MSP430單片機(jī)在微型低功耗數(shù)據(jù)廣播接收機(jī)中的應(yīng)用

一、 引言
我們獨(dú)立自主開發(fā)了數(shù)據(jù)廣播編碼器和微型低功耗調(diào)頻數(shù)據(jù)廣播接收機(jī),整套系統(tǒng)采用連續(xù)相位頻移鍵控(CPFSK)調(diào)制方式,副載波頻率為72KHz,占用帶寬約16Khz,數(shù)據(jù)傳輸速率4.8KHZ。采用CPFSK調(diào)制方式使接收機(jī)易于實(shí)現(xiàn),與QPSK的調(diào)制方式相比對(duì)相位穩(wěn)定度要求不高,不易受外界溫度噪聲的影響,而且在信號(hào)解調(diào)處理時(shí)實(shí)現(xiàn)低功耗。
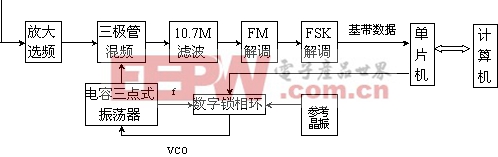
由于在發(fā)送端先后進(jìn)行了數(shù)據(jù)編碼、信道調(diào)制、線性調(diào)頻,所以接收設(shè)備要完成信號(hào)逆處理。硬件結(jié)構(gòu)框圖:
 |
 |
二、MSP430單片機(jī)的特點(diǎn)及在接收機(jī)中的應(yīng)用
TI公司MSP430系列單片機(jī)的超低功耗特性(運(yùn)行在1MHz時(shí)鐘條件下工作電流視工作模式不同為0.1-400uA)、強(qiáng)大的外圍模塊功能、體積小等優(yōu)點(diǎn)適合作為接收機(jī)的CPU。MSP430系列中的各成員集成了較多的片上外圍資源,包含:12位A/D,精密模擬比較器,硬件乘法器,2組頻率可達(dá)8MHZ的時(shí)鐘模塊,2個(gè)帶有大量捕獲/比較寄存器的16位定時(shí)器,看門狗,2個(gè)可實(shí)現(xiàn)異步、同步及多址訪問的串行通信接口,數(shù)十個(gè)可實(shí)現(xiàn)方向設(shè)置及中斷功能的并行輸入、輸出端口等。
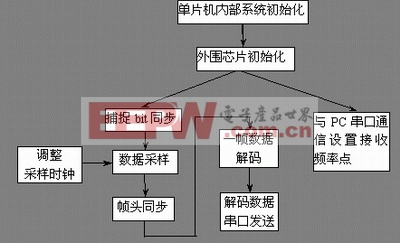
MSP430F123單片機(jī)作為CPFSK數(shù)據(jù)廣播接收機(jī)的CPU主要對(duì)基帶數(shù)據(jù)進(jìn)行處理,完成數(shù)據(jù)鏈路層的工作:
 數(shù)據(jù)解碼
數(shù)據(jù)解碼
| 位同步 |
| 幀同步 |
| 序列去擾 |
| 去交織 |
| R-S糾錯(cuò)解碼 |
| CRC-16校驗(yàn) |
三、數(shù)字通信中的同步問題
數(shù)據(jù)通信中,同步是非常重要的問題,通信系統(tǒng)是否可靠、接收靈敏度是否達(dá)到標(biāo)準(zhǔn),很大程度上依賴于同步技術(shù)的優(yōu)劣。
1、同步不確定性的來源
實(shí)際通信系統(tǒng)中,收發(fā)站之間會(huì)由于電波傳播中的多徑效應(yīng)引起碼相位、載波中心頻率相位的延遲,而且在傳輸信道中隨機(jī)噪聲的疊加引起傳輸波形的失真,連接在接收濾波器之后的判決電路也很難保證無差錯(cuò)的恢復(fù)基帶信號(hào)。這些都會(huì)導(dǎo)致同步的不穩(wěn)定性。
2、實(shí)現(xiàn)同步的幾種方法
按同步功用分類可分為載波同步、位同步、群同步和網(wǎng)同步。
按傳輸同步信息的方式可分為外同步法和自同步法。外同步法:是由發(fā)送端發(fā)送專門的同步信息,接收端把這個(gè)專門的同步信息檢測出來作為同步信號(hào)。自同步法:發(fā)送端不發(fā)送專門的同步信息,而是由接收端設(shè)法從接收信號(hào)中提取同步信息。
本接收機(jī)的CPU要完成的功能中只涉及到位同步和幀(群)同步,由于不能從硬件解調(diào)FSK信號(hào)中恢復(fù)位同步時(shí)鐘,所以采用自同步的方法來實(shí)現(xiàn)位同步,以下結(jié)合MSP430單片機(jī)的特點(diǎn)分析位同步和幀同步的實(shí)現(xiàn)方法。
四、位同步
由于本接收機(jī)接收的碼元速率為4.8KHZ,用CPU捕捉位同步信息,然后進(jìn)行采樣,在配合RS糾錯(cuò),即可達(dá)到數(shù)據(jù)準(zhǔn)確傳輸?shù)囊蟆?br />(一)、位同步的方法:
方法一、
〈圖1〉
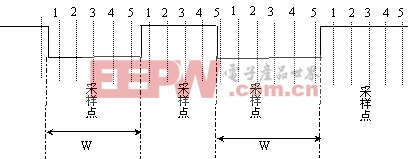
設(shè)置接收端恢復(fù)出的同步時(shí)鐘的頻率為5倍的碼元頻率,這樣就在一個(gè)碼元周期內(nèi),設(shè)置了5個(gè)采樣點(diǎn)。位同步可以分為兩個(gè)過程:捕獲、同步跟蹤。
1、 捕獲,即找到正確的同步時(shí)鐘起始點(diǎn)。在接收的數(shù)據(jù)中,只有0、1跳變沿才能為我們提供位同步信息,如果數(shù)據(jù)長時(shí)間為1或?yàn)?,這將給接收端恢復(fù)位定時(shí)信息造成一定困難。所以發(fā)送端對(duì)數(shù)字基帶信號(hào)進(jìn)行隨機(jī)化處理,一方面起到能量擴(kuò)散的作用,另一方面限制連0碼和連1碼的長度,易于位同步的捕獲和同步時(shí)鐘的恢復(fù)。












評(píng)論