基于C8051F350的無線同步數據采集系統的實現

主采集器和從采集器系統同步是指兩個采集系統開始采集力數據和位移數據的時間是一致的。主采集器和從采集器進行系統同步的流程分別如圖4和圖5所示。
主采集器同步初始化后向從采集器發送一個準備開始采集的同步信號,隨機檢測判斷是否接收到從采集器發來的應答信號。同時主采集器使用定時器中斷監測同步信號是否丟失,定時時間要遠大于從發送同步信號到接收至應答信號所用時間的理論計算值。若定時內沒有收到應答信號則認為同步信號丟失,觸發中斷,在中斷子程序中將重新發送同步信號并重新裝載定時初值,直至收到應答信號。
主采集器的定時時間包括發送同步信號的時間、同步信號的傳輸時間、從采集器檢測判斷該信號的時間、發送應答信號的時間、應答信號的傳輸時間和關定時器的時間。可根據執行相應指令所用的機器周期數、C805lF350的機器周期、nRF24L01的數據傳輸率以及傳輸的數據量計算得出。從采集器接收到同步信號后,向主采集器發送一個應答信號,經過定時間的延時后兩個采集系統完成系統同步。該延時時間包括應答信號的傳輸時間、主采集器檢測判斷該應答信號的時間和關定時器的時間,需在測試現場經多次測試確定。因為主采集器和從采集器選用的同是C8051F350,機器周期相同,所以兩個采集系統在完成系統同步后的數據采集過程可視為是同步進行。
5 測試結果
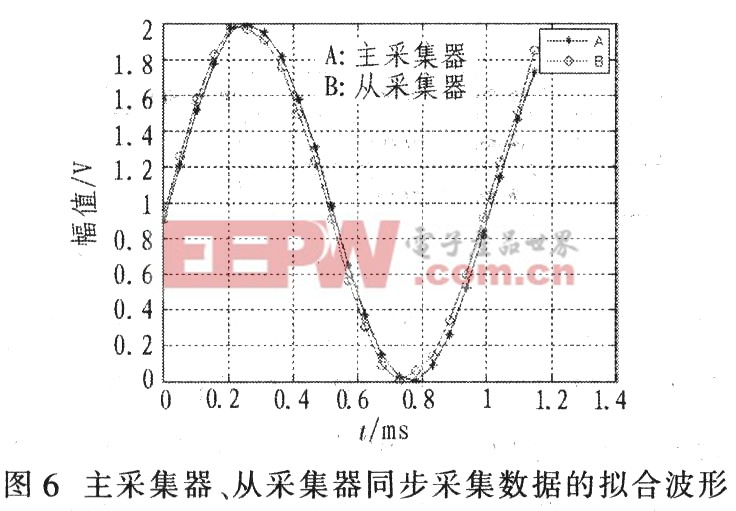
對主采集器、從采集器加入1 V直流偏置、頻率為1 kHz、峰值為1 V的同一正弦信號進行同步數據采集,利用MATLAB將采集到的兩路數據擬合。圖6為多次實驗中擬合效果較好的波形,C805lF350的采樣頻率為19.2 kHz。雖然圖6中的兩路波形存在一定的偏差,但通過計算可知這一偏差很小,對整個系統不會造成影響,實現了系統的同步數據采集。
6 結束語
無線同步數據采集系統通過軟件控制實現同步采集,減少硬件連接,節省資源。該系統具有電路簡單、體積小巧,使用方便等特點,可應用于其他相關場合。












評論