基于LPC2194的4 路 CAN網橋設計

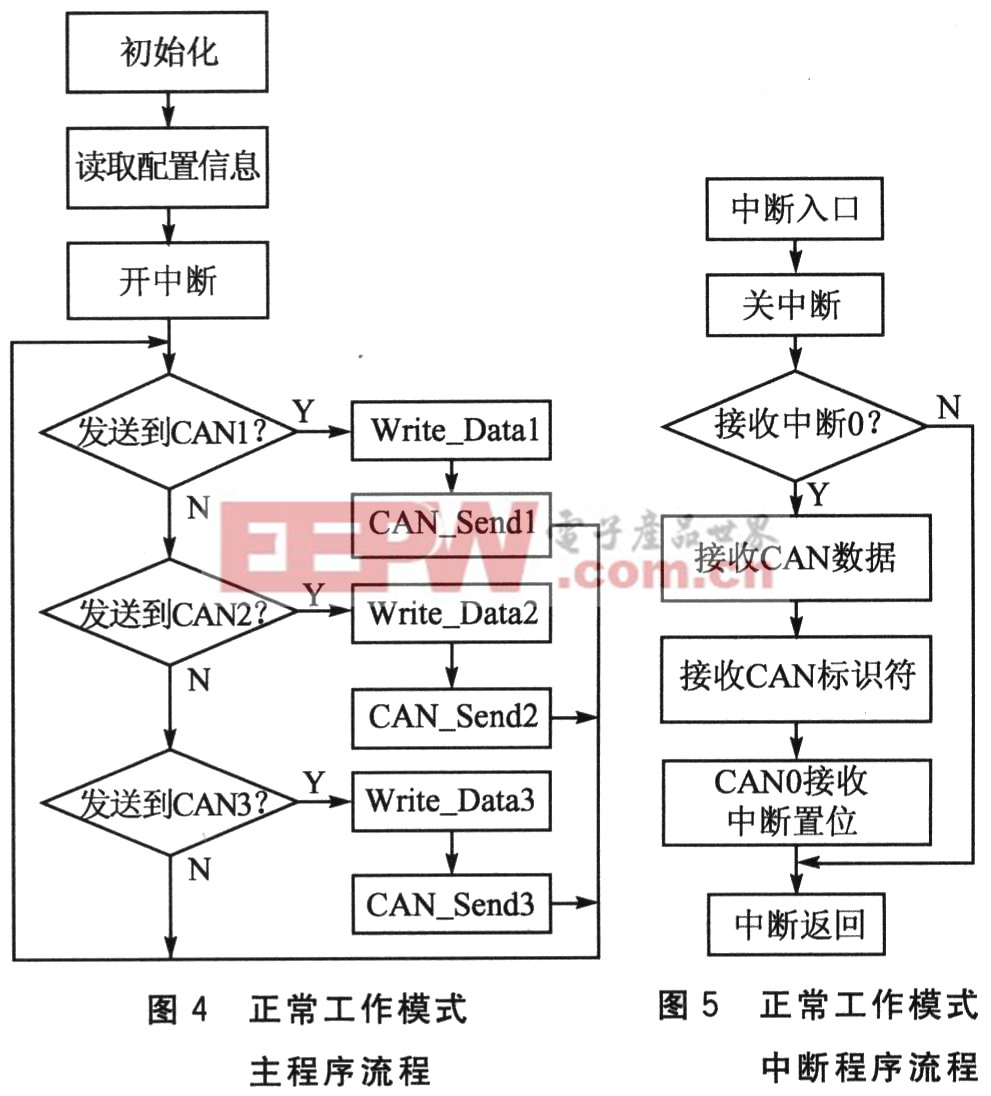
為了提高系統的轉換速度和穩定性,本設計采用了中斷接收和查詢發送的方式。系統中斷接收CAN總線上的數據,并根據路由選擇和標識符的分配選擇發送到其他3路,從而完成網橋的工作。系統主程序和中斷程序流程分別如圖4和圖5所示。本文引用地址:http://www.104case.com/article/173523.htm
4 實驗結果
為了驗證系統的可靠性,設計了一個通信收包率的實驗。通過PC機間隔一定的時間,向CAN網橋一條支路發送8字節的數據,網橋的另一條支路向PC機回復接收到的8字節數據。通過對比發送和接收的字節數來驗證收包率。分別以100 ms、10 ms、5 ms、1 ms的間隔來發送8字節的數據,發送和接收到的字節數為:
①間隔100 ms時,發送1 336個字節,接收1 336個字節,收包率為100%;
②間隔10 ms時,發送3 376個字節,接收3 376個字節,收包率為100%;
③間隔5 ms時,發送4 056個字節,接收4 056個字節,收包率為100%;
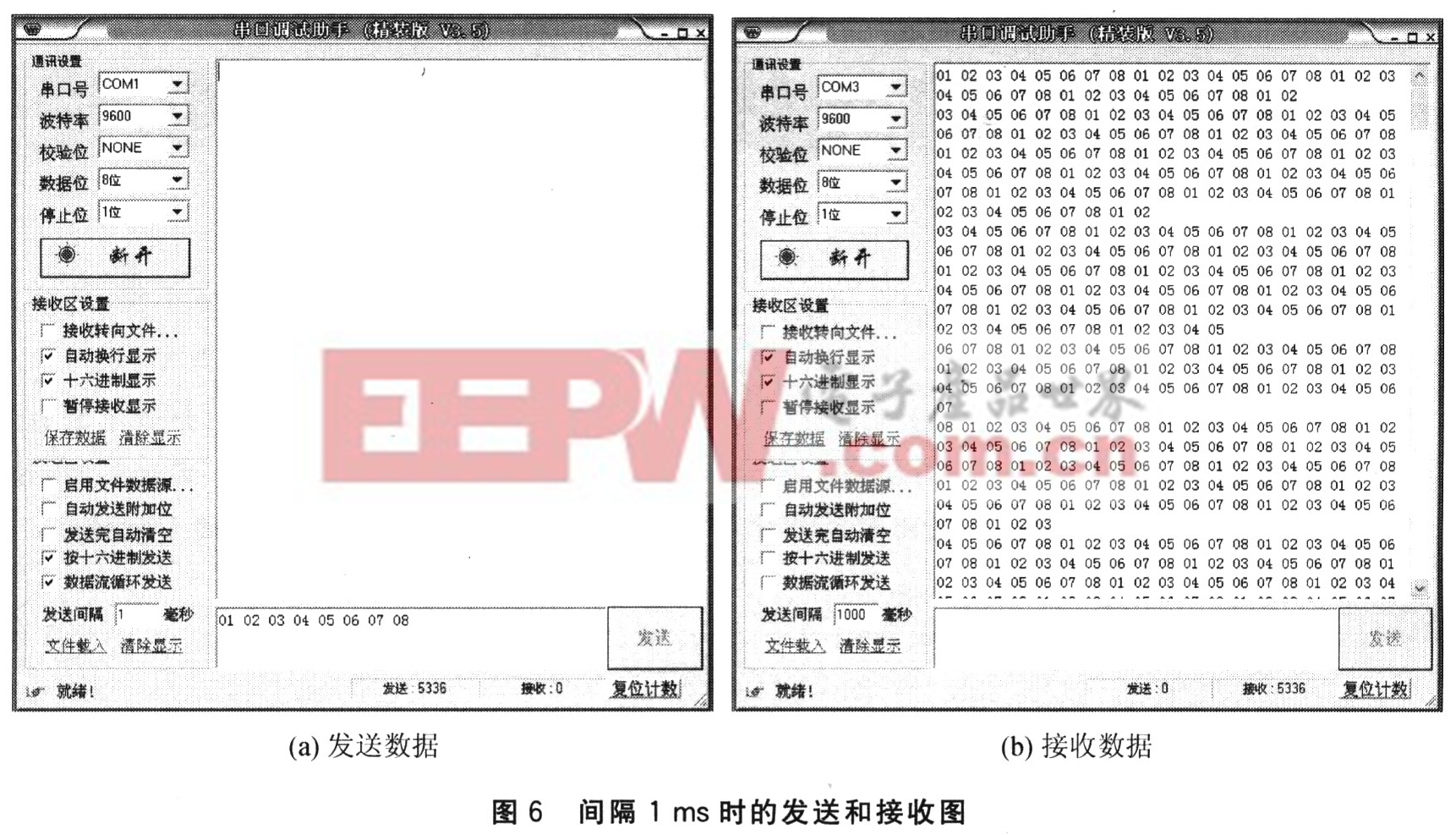
④間隔1 ms時,發送5 336個字節,接收5 336個字節,收包率為100%。
其中,間隔1 ms時的發送和接收圖如圖6所示。
實驗結果表明,在以不同間隔發送數據時,網橋都能很好地完成工作,可滿足實際應用的需要。
結 語
本文設計的4路CAN網橋采用功能強大的ARM芯片LPC2194作為主控芯片,因此能夠及時地處理4路CAN總線的數據傳輸。通過具體實驗證明,該網橋工作穩定、可靠、使用方便,完全滿足現場的需求。










評論