基于C8O51FO4O的CAN總線中繼器設計與實現

3 中繼器MCU狀態控制設計
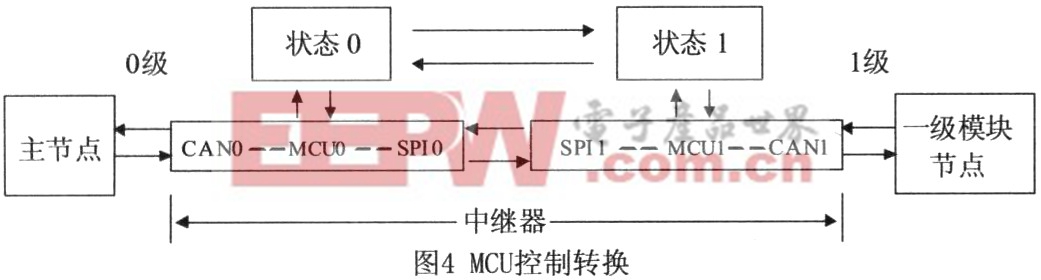
由于中繼器采用雙MCU設計,在進行數據傳輸的時候MCU不僅要監控CAN總線上的數據傳輸,還要監控SPI的數據傳輸,尤其是SPI的主從狀態正確轉換就顯得十分重要了,如圖4所示。
3.1 MOUO的設計
(1)系統初始化,開CAN0中斷,設SPIO為主狀態,監測SPIl是否為從狀態。如果SPIl長期是主狀態,標志通訊錯誤;
(2)CAN0接收上層發過來的數據,判斷SPIl是否為從狀態,如果是,就把CAN0數據轉發給SPIO并等發送完成,如果不是,就向主節點發送錯誤狀態幀;
(3)設SPI0為從狀態,判斷SPIl是否為主狀態,如果是,就等待SPIl發送數據;如果不是,延時10 ms,再判斷還不是,就向主節點發送錯誤幀;
(4)SPIO接收到SPI1的完整數據后,轉發給CAN0,向主節點發數據,完成一次通訊。
3.2 MCUl的設計
(1)系統初始化,開CANl中斷,設SPll為從狀態,準備接收MCU0通過SPIO發來的數據:
(2)監測SPIO是否為主狀態,如果是,就等待接收SPIO的數據,如果不是,就返回錯誤標志位;
(3)接收到SPIO傳來的數據,把SPll設為主,開CANl中斷,將數據通過CANl發送到下一級相應ID節點;
(4)等待CANl下一級節點發回的回答幀,并判延時10ms是否到,10ms沒有收到回答幀,判SPIO是否為從,如果是從,發下一級錯誤幀,如果不是,等待SPIO轉為從的狀態;
(5)SPIl是主狀態并且SPIO為從狀態時,CANl轉發數據給SPIl并等發送完成。
4 系統的實時性分析
中繼器給系統帶來方便的同時,也給系統增加了一些存儲轉發延時,因此在軟件設計中必須考慮系統的實時性,盡量縮短數據的存儲轉發時間。通過對本文提出的雙MCU中繼器系統的分析,影響系統實時性的主要有以下幾個方面:
(1)0級CAN總線發送接收各一幀數據的時間,主要受通信協議(CAN2.0A或2.0B)及CAN0波特率決定;
(2)CAN0產生中斷,通知MCU0準備向SPIO發送時間(中斷時間);
(3) SPI的波特率和發送接收的字節數決定SPIO、SPIl發送接收時間;
(4)MCUl等待時間和MCU1通過CANl向1級CAN節點發送和接收1幀數據的時間;
(5)l級節點模塊MCU響應測量時間,受CANl波特率和通信協議的影響。
總之,當0級和l級實測距離是5km,CAN0和CANl波特率為6.91K,SPI的波特率為1M時,主節點到l級節點發送接收一次數據的時間為0.12s,達到大壩監測的實時性要求。
5 結論
本文設計的中繼器完成了各項設計指標,符合工程的要求,并且在拉西瓦水電站高拱壩的高邊坡大型遠程監控系統中承擔數據轉發和網絡拓展功能,運行結果表明,傳輸數據穩定可靠,并且運行正常。










評論