紅外線遙控器解碼程序

紅外線遙控是目前使用最廣泛的一種通信和遙控手段。由于紅外線遙控裝置具有體積小、功耗低、功能強、成本低等特點,因而,繼彩電、錄像機之后,在錄音機、音響設備、空凋機以及玩具等其它小型電器裝置上也紛紛采用紅外線遙控。工業設備中,在高壓、輻射、有毒氣體、粉塵等環境下,采用紅外線遙控不僅完全可靠而且能有效地隔離電氣干擾。
本文引用地址:http://www.104case.com/article/173450.htm1 紅外遙控系統
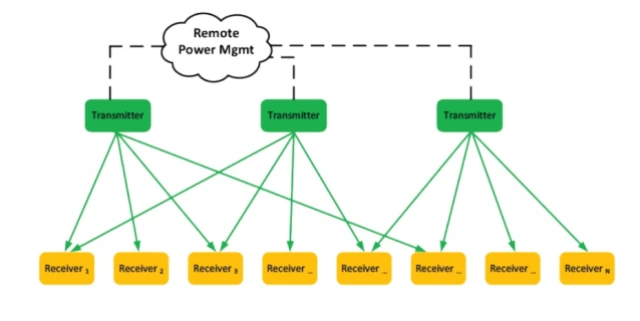
通用紅外遙控系統由發射和接收兩大部分組成,應用編/解碼專用集成電路芯片來進行控制操作,如圖1所示。發射部分包括鍵盤矩陣、編碼調制、LED紅外發送器;接收部分包括光、電轉換放大器、解調、解碼電路。

2 遙控發射器及其編碼
遙控發射器專用芯片很多,根據編碼格式可以分成脈沖寬度調制和脈沖相位調制兩大類,這里我們以運用比較廣泛,解碼比較容易的脈沖寬度調制來加以說明,現以LC7461組成發射電路為例說明編碼原理。當發射器按鍵按下后,即有遙控碼發出,所按的鍵不同遙控編碼也不同。這種遙控碼具有以下特征:
采用脈寬調制的串行碼,以脈寬為0.565ms、間隔0.56ms、周期為1.125ms的組合表示二進制的“0”;以脈寬為0.565ms、間隔1.685ms、周期為2.25ms的組合表示二進制的“1”
上述“0”和“1”組成的42位二進制碼經38kHz的載頻進行二次調制以提高發射效率,達到降低電源功耗的目的。然后再通過紅外發射二極管產生紅外線向空間發射,
7461產生的遙控編碼是連續的42位二進制碼組,其中前26位為用戶識別碼,能區別不同的紅外遙控設備,防止不同機種遙控碼互相干擾。后16位為8位的操作碼和8位的操作反碼用于核對數據是否接收準確。
當遙控器上任意一個按鍵按下超過36ms時,LC7461芯片的振蕩器使芯片激活,將發射一個特定的同步碼頭,對于接收端而言就是一個9ms的低電平,和一個4.5ms的高電平,這個同步碼頭可以使程序知道從這個同步碼頭以后可以開始接收數據。
解碼的關鍵是如何識別“0”和“1”,從位的定義我們可以發現“0”、“1”均以0.56ms的低電平開始,不同的是高電平的寬度不同,“0”為0.56ms,“1”為1.68ms,所以必須根據高電平的寬度區別“0”和“1”。如果從0.56ms低電平過后,開始延時,0.56ms以后,若讀到的電平為低,說明該位為“0”,反之則為“1”,為了可靠起見,延時必須比0.56ms長些,但又不能超過1.12ms,否則如果該位為“0”,讀到的已是下一位的高電平,因此取(1.12ms+0.56ms)/2=0.84ms最為可靠,一般取0.84ms左右即可。
根據紅外編碼的格式,程序應該等待9ms的起始碼和4.5ms的結果碼完成后才能讀碼。
接收器及解碼
LT0038是塑封一體化紅外線接收器,它是一種集紅外線接收、放大、整形于一體的集成電路,不需要任何外接元件,就能完成從紅外線接收到輸出與TTL電平信號兼容的所有工作,沒有紅外遙控信號時為高電平,收到紅外信號時為低電平,而體積和普通的塑封三極管大小一樣,它適合于各種紅外線遙控和紅外線數據傳輸。
下面是一個對啟點開發板配套的紅外線遙控器的解碼程序,它可以把試驗板佩戴的32鍵的紅外遙控器每一個按鍵的鍵值讀出來,并且通過實驗板上P1口的8個LED顯示出來,在解碼成功的同時并且能發出“嘀嘀嘀”的提示音。
ORG 0000H
AJMP MAIN ;轉入主程序
ORG 0003H ;外部中斷P3.2腳INT0入口地址
AJMP INT ;轉入外部中斷服務子程序(解碼程序)
;以下為主程序進行CPU中斷方式設置
MAIN: SETB EA ;打開CPU總中斷請求
SETB IT0 ;設定INT0的觸發方式為脈沖負邊沿觸發
SETB EX0 ;打開INT0中斷請求
;以下對單片機的所有引腳進行初始化,全部設置成高電平
MOV P2,#11100111B
AJMP $
;以下為進入P3.2腳外部中斷子程序,也就是解碼程序
INT: CLR EA ;暫時關閉CPU的所有中斷請求
MOV R6,#10
SB: ACALL YS1 ;調用882微秒延時子程序
JB P3.2,EXIT ;延時882微秒后判斷P3.2腳是否出現高電平如果有就退出解碼程序
DJNZ R6, SB ;重復10次,目的是檢測在8820微秒內如果出現高電平就退出解碼程序
;以上完成對遙控信號的9000微秒的初始低電平信號的識別。
JNB P3.2, $ ;等待高電平避開9毫秒低電平引導脈沖
ACALL YS2 ;延時4.74毫秒避開4.5毫秒的結果碼
MOV R7,#26 ;忽略前26位系統識別碼
JJJJA: JNB P3.2,$ ;等待地址碼第一位的高電平信號
LCALL YS1 ;高電平開始后用882微秒的時間尺去判斷信號此時的高低電平狀態
MOV C,P3.2 ;將P3.2引腳此時的電平狀態0或1存入C中
JNC UUUA ;如果為0就跳轉到UUUA
LCALL YS3 ;檢測到高電平1的話延時1毫秒等待脈沖高電平結束
UUUA: DJNZ R7,JJJJA
MOV R1,#1AH ;設定1AH為起始RAM區
MOV R2,#2 ;接收從1AH到1BH的2個內存,用于存放操作碼和操作反碼
PP: MOV R3,#8 ;每組數據為8位
JJJJ: JNB P3.2,$ ;等待地址碼第一位的高電平信號
LCALL YS1 ;高電平開始后用882微秒的時間尺去判斷信號此時的高低電平狀態
MOV C,P3.2 ;將P3.2引腳此時的電平狀態0或1存入C中
JNC UUU ;如果為0就跳轉到UUU
LCALL YS3 ;檢測到高電平1的話延時1毫秒等待脈沖高電平結束
UUU: MOV A,@R1 ;將R1中地址的給A
RRC A ;將C中的值0或1移入A中的最低位
MOV @R1,A ;將A中的數暫時存放在R1數值的內存中
DJNZ R3,JJJJ ;接收滿8位換一個內存
INC R1 ;對R1中的值加1,換下一個RAM
DJNZ R2,PP ;接收完8位數據碼和8位數據反碼,存放在1AH/1BH中
MOV A,1AH
CPL A ;對1AH取反后和1BH比較
CJNE A,1BH,EXIT ;如果不等表示接收數據發生錯誤,放棄
MOV P1,1AH ;將按鍵的鍵值通過P1口的8個LED顯示出來!
SETB P3.5 ;蜂鳴器鳴響-嘀嘀嘀-的聲音,表示解碼成功
LCALL YS2
LCALL YS2
LCALL YS2
CLR P3.5 ;蜂鳴器停止
EXIT: SETB EA ;允許中斷
RETI ;退出解碼子程序
YS1: MOV R4,#20 ;延時子程序1,精確延時882微秒
D1: MOV R5,#20
DJNZ R5,$
DJNZ R4,D1
RET
YS2: MOV R4,#10 ;延時子程序2,精確延時4740微秒
D2: MOV R5,#235
DJNZ R5,$
DJNZ R4,D2
RET
YS3: MOV R4,#2 ;延時程序3,精確延時1000微秒
D3: MOV R5,#248
DJNZ R5,$
DJNZ R4,D3
RET
END




評論