三種單片機(jī)模擬串口方法介紹

AVR軟件模擬串口程序
來源:coldra資料室 作者:coldra
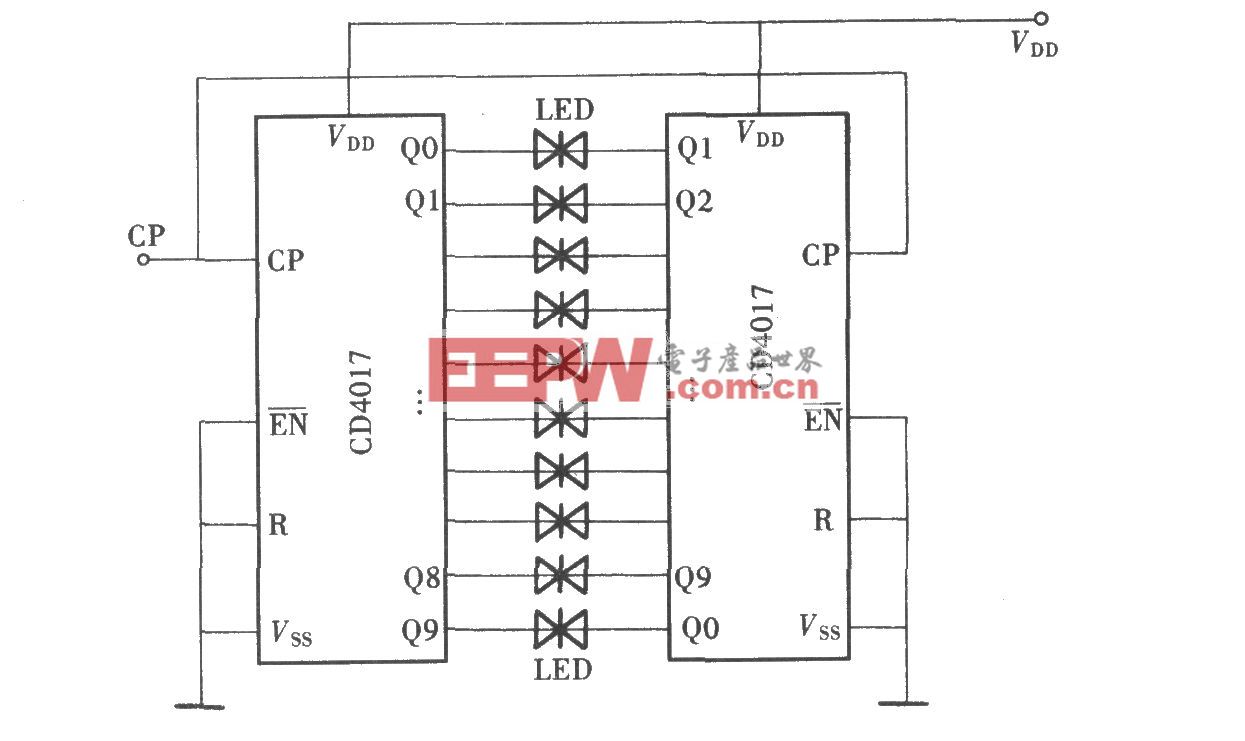
輸出:用定時(shí)器控制普通IO口輸出位
輸入:用外部中斷+定時(shí)器,判斷位的寬度
好幾天沒休息,利用閑暇寫的,也沒找到別人的參考程序,不過終于算是穩(wěn)定了,其實(shí)還應(yīng)該有很多其它的方法可以試一下,比如用PWM輸出串行數(shù)據(jù),用輸入捕獲接收數(shù)據(jù),或定時(shí)查詢,或用任意一個(gè)IO口中斷,則每個(gè)引腳都有可能
現(xiàn)在還有些問題,全雙工同時(shí)收發(fā)時(shí)發(fā)送偶爾出錯(cuò),占用兩個(gè)定時(shí)器有些浪費(fèi),以后再修改吧,最好加上各種波率
本程序?yàn)橹苯诱霾糠?刪了無關(guān)的部分,在此可能有些變量沒用,或有段落遺漏,請(qǐng)諒
#include
#include
#include
#include
#define Sbit1() PORTD =1#define Sbit0() PORTD=~(1
volatile unsigned int
eep_ms,//毫秒計(jì)時(shí)
keytime, //等待時(shí)間
SoundOnTime; ////
volatile unsigned char
rdata,
key,
start=0,
keycode, //
*TxPoint,
rtime,
INT0_time, //中斷次數(shù)
RxLength=0, //接收長(zhǎng)度
RUDR, //摸擬串口接收的數(shù)據(jù)
TxLength, //串口發(fā)送數(shù)據(jù)長(zhǎng)度
SUDR; //串口發(fā)送的數(shù)據(jù)
unsigned char arr[10],DispBuff[10];
void Initial_IO(void)//IO口初始化
{
DDRD = 0X82; //PD1串口輸出,PD0串口輸入,PD2模擬串口輸入(INT0)
PORTD = 0X82;//PD1輸出高電平
}
void Initial_INT0(void)
{
EICRA =(1EIMSK =1 }
void Initial_timer0(void)//定時(shí)器0初始化
{
TCCR0B =(1TIMSK0 =(1 }
void Initial_timer1(void)
{
TCCR1A=(1 TCCR1B=(1ICR1=1000;
TIMSK1 =(1 }
void Initial_timer2(void)
{
TCCR2B=(1TIMSK2 =(1 }
void Initial_WDR(void)//看門狗初始化
{
wdt_enable(WDTO_1S);
wdt_reset();
}
void Initial(void)
{
Initial_IO();
Initial_timer0();
Initial_timer1();
Initial_timer2();
Initial_INT0();
Initial_WDR();
sei();
}
/*啟動(dòng)串口發(fā)送*/
void SendData(unsigned char *P,unsigned char DataLength)
{
TxLength=DataLength;
TxPoint=P;
start=0;
}
int main (void)
{
Initial();
while(1)
{
wdt_reset();
if((rdata)(eep_ms>10))//收到數(shù)據(jù)延時(shí)10mS后啟動(dòng)發(fā)送,回送驗(yàn)證數(shù)據(jù)
{
key=0;
SendData(DispBuff[0],9);//發(fā)送DispBuff[0]的9位數(shù)據(jù)
while(TxLength);//等待發(fā)送完成
rdata=0;
eep_ms=0;
}
}
}










評(píng)論