基于AT89S52單片機的超聲波倒車雷達系統的設計

如上圖,有兩組電源,一組是模塊的電源 一組是背光板的電源 均為5V供電。R3是調節對比度的引腳,調節此腳上的電壓可以改變黑白對比度。RS是很多液晶上都有的引腳,是命令/數據選擇引腳,該腳電平為高時表示將進行數據操作;為低時表示進行命令操作。RW也是很多液晶上都有的引腳,是讀寫選擇端,該腳電平為高時表示要對液晶進行讀操作;為低時表示要進行寫操作。同樣,很多液晶模塊有E引腳,通常在總線上信號穩定后給一正脈沖通知把數據讀走,在此腳為高電平的時候總線不允許變化。DO~D7 8位雙向并行總線,用來傳送命令和數據。BLA是背光源正極,BLK是背光源負極。本文引用地址:http://www.104case.com/article/173378.htm
3 軟件設計
本系統的軟件設計采用模塊化設計,由主程序、超聲波發射子程序、超聲波接收子程序、溫度補償子程序、報警子程序以及顯示子程序組成。主程序流程圖如圖6所示。
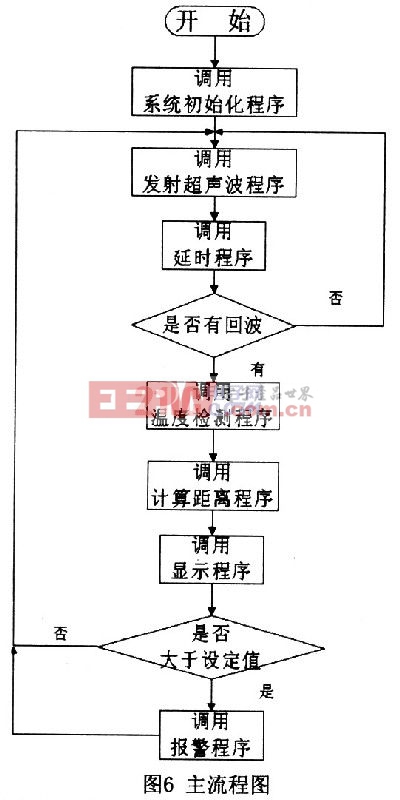
超聲波倒車雷達系統,最重要的就是對發射信號的控制及接收測量的時機控制。在設計中,AT89S52對發射的控制就是對40kHz方波產生電路的控制。由AT89S52的Pl.0口控制超聲波發射電路以6個脈沖的序列發射出去,在程序中用延時實現。脈沖發射同時打開定時器T0開始計時,發射后等待1ms打開外部中斷INT0,等待回波反射到接收探頭。等待1ms的原因是,超聲波發射探頭發射的超聲波一般都會存在余波干擾,有部分聲波會直接傳到接收探頭,經接收電路放大后,系統就會把它誤認為是檢測的回波信號,發射后等待1ms可以避免檢測到余波信號,當然這也會導致測量盲區的存在。
4 結論
為了證明本文設計的倒車雷達系統的可靠性,在內部進行了實地測量。本系統測距范圍為0.2~5m。最大誤差小于3cm。因此,本系統具有工作穩定、抗干擾能力強、靈敏度高的特點。












評論