一種簡易智能機器人的設計及應用

2.3 傳感器單元
整個機器人共采用了9個傳感器,他們分布在整個機器人的不同部位,相互配合起著不同的作用,如圖4所示。
圖4中各傳感器說明如下:
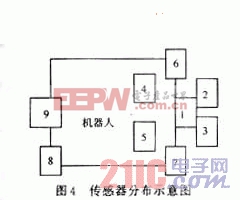
傳感器1 置于機器人正前方朝下的金屬探測傳感器,用于探測金屬。
傳感器2 置于機器人正前方朝前的超聲波傳感器,用于檢測障礙物。超聲波來源于555產生40 kHz的方波信號,經超聲波發射頭發出。發射頭不斷發出信號,當遇到障礙物時,信號會被反射回來,從而接收頭會接受到信號,將信號送入單片機進行相應的判斷和處理。
傳感器3 置于機器人正前方朝下的紅外光電傳感器,用于檢測停止線。紅外發射管發出信號,經不同的反射介質反射,根據紅外接受管是否接受到信號做出相應的判斷。
傳感器4,5 置于機器人底座下方朝下的紅外光電傳感器,用于檢測地面的引導線,原理同傳感器3。
傳感器6,7 置于機器人正前方朝前的光敏電阻傳感器,用于尋找光源。當機器人前方有光源照射時,光敏電阻的大小將會改變,將2個傳感器的改變量進行比較處理后送入單片機,單片機將會產生相應的調整信號,使機器人朝著光強的方向行走。
傳感器8 置于機器人后方兩側朝外的超聲波傳感器,用于在機器人遇到障礙物時的轉彎處理,判斷機器人是否完全繞開障礙物,原理同傳感器2。
傳感器9 置于機器人正后方的光電碼盤,用于計里程,他借助于鼠標原理,選用直徑為2.6 cm的塑料小輪自制光電碼盤,經過打磨使其周長為8 cm,再在該小輪上打等距離的8個孔,(如圖5所示),最小測距精度可達到1 cm,足以滿足要求,兩側裝上光電傳感器,將其安裝在車尾,使之與車的行駛同步。就實際情況自制出來的各個孔之間的距離無法精確相等,但經過具體測量該光電碼盤能保證行駛50 cm能產生50個脈沖,于是采用他作為計算距離的基準單位。在直道區,可由該電路產生的脈沖數,計算出鐵片中心線至起跑線間的距離。












評論