基于MEMS的振動監測系統的設計

2.3 無線傳輸模塊
無線傳輸模塊可以使用GPRS模塊或CDMA模塊,應當根據監測地點的具體情況選擇。在本設計中采用Motorola公司的GPRS模塊G24L。G24L是一款高速的GSM/GPRS/EDGE模塊,具有2個物理UART和標準USB 2.0接口,可用于AT命令和數據傳輸,系統默認的波特率是9600b/s。
設計中通過MSP430單片機初始化控制G24L的工作狀態,連接圖如圖4所示。MEMS傳感器監測到的振動信號經由MCU控制模塊采集,再通過GPRS無線通信模塊傳輸到上位機,當振動值超過設定閾值時,發出報警信息。
2.4 電源模塊
由于本系統在野外工作,所以采用低功耗設計,使用鋰電池供電。同時設計了外接電源供電接口,在條件允許的情況下采用外接電源供電,可以延長電池的使用壽命。
3 系統軟件設計
3.1 單片機程序
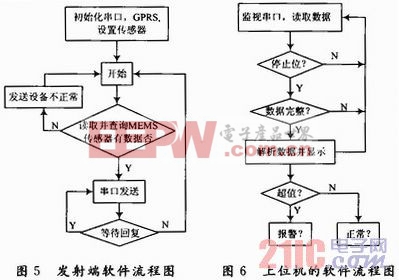
發射端軟件流程圖如圖5所示,首先初始化串口、GPRS模塊G24L和傳感器,然后訪問傳感器的地址并采集存儲器的數據,最后將數據包以一定的格式通過串口發送給上位機。本文引用地址:http://www.104case.com/article/171692.htm
3.2 上位機軟件程序
設計所采用的通信協議為:一個數據包中10個字節,其中2位起始位,2位停止位,中間6位數據位,包含x軸、y軸、z軸3個方向的重力加速度信息。上位機的軟件流程圖如圖6所示。
4 測試結果
用VC++編程實現上位機控制,通過串口發送AT指令控制GPRS模塊的數據收發。
測試終端接收界面如圖7所示。

選取水平面坐標為x和y方向,垂直水平面的為z方向。由于加速度傳感器寄存器值和傳感器放置的位置有關,因此正常情況下x軸的標準值和其他2個方向值大小不一樣,但不影響獲取該方向的加速度振動信息。水平面上移動傳感器所處位置,x和y軸信息會相應變化,垂直移動時,z軸會有相應變化。
測試過程中,如果沒有振動,傳感器讀取的數據是固定的,通過通信協議由串口接收的原始數據為:24 08 3 8 3 6 3 d a 76,其中24 0兩位為起始位,最后2位da為停止位,中間是數據位8 3 8 3 6 3(8 3為x方向接收的數據,8 3為y方向接收的數據,6 3為z方向接收的數據),76為校驗和。所以上位機可以收到6個固定的十六進制數據。當水平移動傳感器位置,x,y方向會有相應的變化,變化量大于設定閾值時就會報警。
測試過程中發現,如果采取的校驗方式不好,虛警概率很大,這主要和G24L無線模塊抗干擾性有關。后經過多次比較校驗方式,最后得到的結果基本無虛警,達到要求。
5 結語
該系統利用MSP430單片機實時采集兩個雙軸加速度傳感器構成的三分量振動信息,并通過GRPS無線傳輸模塊傳給上位機,從而實現對手機基站信號覆蓋區域內的振動監測。如果采用高精度三分量MEMS加速度傳感器,對該系統可稍加修改后還可以用于石油物探等領域。











評論