基于CAN總線的智能繼電器研究

3 電流信號的數據采集
系統電流信號的采集,文中采用的是美國國家半導體生產的8位分辨率、雙通道A/D轉換芯片。文中之所以使用該款芯片,主要是考慮到它的體積較小、兼容性強、性價比高,更為重要的是它的數據是串行輸出,節約了單片機的管腳資源。
一般情況下,和單片通信的管腳由以下4個:片選端CS、時鐘輸入端CLK、數據輸出端DO、模式選擇輸入端DI。通過對時序圖的分析發現,DI和DO不是始終同時有效,因此在設計電路時,可以將此二管腳并接到一起作為一個管腳連接到單片機上。ADC轉換流程大致如下。首先是使能選中芯片,即要拉低片選CS,并且要保持該電平到轉換完畢,因為當CS置位的時候,該芯片是不能使用的;其次是要發送一個起始信號,這就需要在第一個時鐘的下降沿到來之前拉高DI;再次是要輸入通道選擇控制字進行轉換通道選擇,通道控制的選擇需要在接下來第2、3個脈沖下降沿來臨之前輸入兩位數據文中先后對DI輸入1,0;最后是從DO端輸出AD轉換結果,即在先在第4時鐘下降沿到第11個時鐘下降沿之間的每一個下降沿都會輸出A/D轉換結果,高位在前,共8位,接下來在從第11個時鐘下降沿到第19個時鐘下降沿的每個時鐘下降沿又一次
輸出和之前相反的數據,也是8位,只是這個時候是低位在前;最后便是拉高CS,禁止使能A/D轉換,對該2個8位數據進行比對,將轉換結果送到數據寄存器中。圖5是ADC轉換的流程圖。
4 看門狗MAX813L
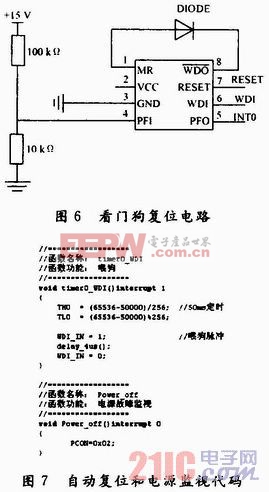
在單片機構成的系統當中,單片機的工作往往會受到來自外界干擾,導致程序陷入死循環,進而使得單片機無法正常工作,單片機的手動復位又有其局限性,為此文中采用專門監測單片機運行狀態的芯片MAX813L。該芯片不僅能實現系統復位,還可以監測電源狀態,當出現掉電或者低壓等情況時保護重要數據。
4.1 系統復位
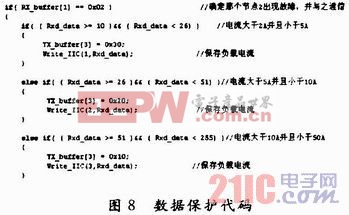
當系統受到某些干擾的影響,使得系統程序跑飛,當該芯片的看門狗信號輸入端WDI在超過1.6 s時間內得不到清除定時器的脈沖時,看門狗輸出管腳WDO將由高電平變為低電平,根據圖6會發現,復位輸入端MR會被拉低成低電平,當這個低電平保持時間在140 ms以上時,復位信號輸出端RST會復位信號,從而復位CPU。根據前面分析,系統的正常運行需要最多以1.6 s的時間間隔給看門狗輸入端輸入脈沖。文中使用定時器0的工作方式1每隔50 ms給看門狗芯片一個清定時器脈沖。喂狗的實現代碼如圖7所示。
4.2 電源監視
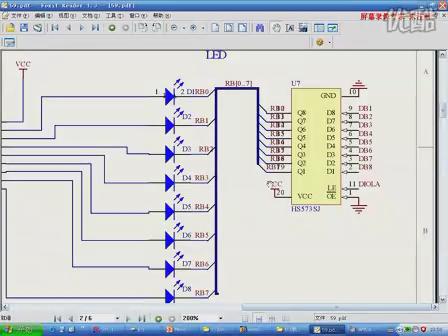
當電源故障輸入管腳的電位低于1.25 V時,電源故障輸出端的電平會由高變低,導致微處理器P32管腳的電平發生變化,進而觸發外部中斷0,執行中斷服務程序,即凍結寄存器的內容,保存RAM中的數據,激活掉電模式,進入掉電工作狀態。要想退出掉電模式,系統必須復位。電源監視的部分代碼如圖8所示。

繼電器相關文章:繼電器工作原理
時間繼電器相關文章:時間繼電器







評論