基于單片機的GPS/電子羅盤測姿定位系統

摘要:設計了一種基于GPS/電子羅盤的測姿定位系統。該系統利用單片機C8051F021作為中央處理器,功耗極低的iTrax03-02作為GPS接收機,數字電子羅盤HMR3300提供姿態信息,通過串口通信實現了實時測姿定位功能。實地跑車實驗結果表明,該系統可以正確、可靠地完成運動載體的姿態和位置信息的實時測量,為最終的組合導航實現奠定了基礎。
本文引用地址:http://www.104case.com/article/171419.htm引言
當前,衛星導航成為導航技術發展的主要方向,自助式導航繼續發展,組合導航系統已經成為主要的導航方式。針對電子羅盤經啟動后要較長時間才能穩定,而陀螺球轉速高、磨損大、壽命短等問題,本文做了載體姿態和位置測量的研究。就測姿定位問題,本文基于單片機最小系統,設計了基于GPS/電子羅盤的測姿定位系統,將GPS與電子羅盤組合,利用多種信息源相互補充,構成了一種有多余度和高精度的導航定位系統。它具有高精度、穩定、小型化、易操作等特點,為最終組合導航的實現奠定了基礎。
1 系統總體設計方案
基于GPS/電子羅盤的測姿定位系統結構框圖如圖1所示。
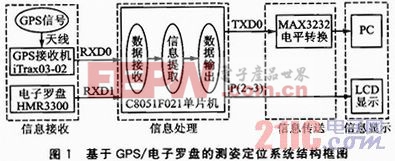
RXD0為GPS接收機發送到單片機的數據;RXD1為電子羅盤發送到單片機的數據;TXD0為單片機發送到MAX3232的數據;P(2~3)為單片機發送到LCD進行顯示的數據。整個流程如下:首先,GPS接收機iTrax03-02通過天線接收GPS衛星發射的信號,按要求輸出當前經度、緯度和高度信息。電子羅盤HMR3300實時輸出跟蹤天線的當前方向、俯仰信息。GPS接收機iTrax03-02和電子羅盤HMR3300輸出的信息由C8051F021單片機通過串行口接收,單片機子系統是整個系統的控制核心,它完成串行信息的接收、數據處理和對各部分電路的控制工作。經處理的信息由單片機串行口輸出后,再經過電平轉換芯片MAX3232實現由TTL到RS232電平的轉換。最后,再由MAX3232將信息傳入上位機顯示即可。
2 系統硬件設計
2.1 電路的基本構成
在信息接收模塊中,本系統采用iTrax03-02作為GPS接收機,GPS上電后將自動從天線接收GPS衛星發射的射頻信號,經過一系列的處理過程,通過并行通道完成最佳位置衛星的跟蹤,測出衛星到天線的傳播距離,解讀導航電文,從而計算出經度、緯度、海拔高度等信息。
iTrax03-02是體積小、功耗低的GPS OEM板,具有極快的信號獲取引擎,自帶2個UART接口,可接收NMEA0183格式的數據和二進制的iTaIk格式數據。
iTrax03-02內嵌8 Mb的Flash,可用于存儲中間定位數據,并為授時應用提供極高的精度。對偏航、俯仰等姿態信息的獲取選用了數字電子羅盤HMR3300,航向精度為±1.0°,分辨率可達0.1°,橫滾和俯仰的精度為±0.3°,分辨率為±0.1°,輸出端口采用RS232(或RS48 5)。同時,它還具有體積小、功耗低、價格便宜等特點。
在信息處理模塊中,GPS和電子羅盤將采集到的信息通過串口不斷發送過來,單片機通過對這些數據的處理提取所需的有用信息,然后將有用信息按一定協議組裝成數據包傳送給電平轉換器發送模塊。控制整個系統的中央處理器選用C8051F021,它是集成在一塊芯片上的混合信號系統級單片機,其最突出的優點就是改進了可以控制片內數字資源與外部I/O引腳相連的交叉開頭網絡。
C8051F021具有異步的雙串口UART0和UART1,可分別用于接收電子羅盤信息與GPS信息。而在接收電子羅盤信息與GPS信息時要分為兩個中斷分別進行信息處理。C8051F021具有多中斷源,滿足這一性能要求。此外,C8051F021還具有低功耗、高速度、低電壓工作(3.3 V)、高容量存儲器等特性,滿足本方案的要求,故信息處理模塊采用C8051F021單片機。
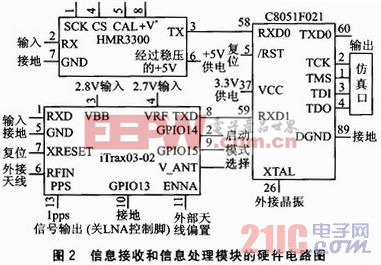
信息接收和信息處理模塊的硬件電路圖如圖2所示。












評論