紅外接收(模擬串口接收)

//******************************************************************
//@FileName: UART51.C
//@Controller AT89S52
//@Compiler Keil
//@Hardware: 一個普通的I/O,一個定時器T0;和TXD
//Description: 該程序為接收程序,接收發送的數據,并通過串口輸出顯示,
// 判斷是否接收到正確數據,接收程序主要在于時間的控制,
// 說白了,就是模擬串口接收數據
// 發送程序通過TXD直接發送數據,將要發出的數據與38KHZ的方波
// 通過兩個9012三極管處理,得到要發出的波形,再通過發射管發射
//@Data 2010-11-14
//Version 1.0
//*****************************************************************
#includereg52.h> //頭文件
#define ubyte unsigned char //宏定義
#define uword unsigned int
#define Rx_Lg 16 //定義要接收數據的個數
sbit HWRx=P0^0; //紅外接收引腳聲明
bit State1,State2; //用于暫存紅外引腳的前兩個狀態
ubyte Count=0; //定時器計數值
ubyte Date_Rx=0; //接收數據
ubyte Bit8_Rx=0; //接收的8位
ubyte Table_Cnt=0; //緩沖區變量值
ubyte Flag=0,Flag8=0; //16位數據接收完成標志位,和一個數據接收完成標志位
ubyte Table_Rx[16]={0}; //接收數據的緩沖區
//****************************************************************************
//@Function: Data8_Rx()
//@Description 接收一個八位數據
//@ReturnValue 無
//@Parameters 無
//@Data 2010-11-14
//Version 1.0
//****************************************************************************
void Data8_Rx() //接收8位數據的子函數
{
if((Bit8_Rx>=1)(Bit8_Rx=8)) //判斷接收的數據8位,是否全部接收完成
{
Date_Rx>>=1; //左移一位
if(HWRx==1) //判斷紅外接收引腳的狀態
Date_Rx|=0x80; //是高,則將最高位置1
Bit8_Rx--; //減一
if(Bit8_Rx==0) //八位數據全部接收,置標志位
Flag8=1;
}
}
//****************************************************************************
//@Function: Init_Uart()
//@Description 串口初始化,波特率為9600Bit/s
//@ReturnValue 無
//@Parameters 無
//@Data 2010-11-14
//Version 1.0
//****************************************************************************
void Init_Uart() //產生波特率的初始化函數
{
TMOD|=0x20; //定時器T1工作在方式2
SCON=0x50; //開ES,工作在方式1
TH1=0xfd; //產生9600
TL1=0xfd;
TR1=1; //啟動定時器
}
//****************************************************************************
//@Function: main()
//@Description 主函數
//@ReturnValue 無
//@Parameters 無
//@Data 2010-11-14
//Version 1.0
//****************************************************************************
void main()
{
ubyte i=0; //循環變量
TMOD=0x01; //定時器T0工作在方式1
TH0=0XFF; //定時260us,按理應該是1/1200/3=278us
TL0=0X0F;
EA=1; //開總控
ET0=1; //打開定時器
TR0=1; //啟動定時器
Init_Uart(); //調用串口初始化函數
while(1) //等待中斷
{ }
}
//****************************************************************************
//@Function: Time0()
//@Description 定時器T0的中斷函數
//@ReturnValue 無
//@Parameters 無
//@Data 2010-11-14
//Version 1.0
//****************************************************************************
void Time0() interrupt 1 //定時器中斷函數
{
ubyte i=0; //定義一個變量
Count++; //計算進入中斷的次數
TH0=0XFF; //重裝初值
TL0=0X0F;
if((Count==1)(Bit8_Rx==0)) //判斷數據是否發送完成
{
Count=0; //是,則計數變量清零
State2=State1; //賦紅外引腳的狀態
State1=HWRx;
if((HWRx==0)(State1==0)(State2==1)) //判斷是否有有效數據,
即檢測到起始位
Bit8_Rx=8; //是,賦值,準備接收
}
if((Count>=3)((Bit8_Rx!=0))) //判斷數據是否接收完成
{
Count=0; //沒有,清零計數變量
Data8_Rx(); //接收該位
}
if((Flag8==1)(Bit8_Rx==0)(HWRx==1)) //判斷該數據的8位是否全部
接收完,并且檢測到停止位
{
Flag8=0; //把8位數據接收完的標志位清零
Table_Rx[Table_Cnt]=Date_Rx; //暫存該數據
Table_Cnt++; //變量加,準備下一個
if(Table_Cnt>=Rx_Lg) //判斷16個數據是否接收完成
{
Table_Cnt=0; //是,則清零
Flag=1; //置標志位
}
}
if(Flag==1) //判斷所有數據接收完成
{
Flag=0; //是,則該標志位清零
for(i=0;i16;i++) //通過串口,發送該16個數據
{
SBUF=Table_Rx[i]; //發送緩沖區數據
while(!TI); //等待發送完成
TI=0; //發送完成,清標志位
}
}
}

萬能遙控器相關文章:萬能遙控器代碼
紅外遙控器相關文章:紅外遙控器原理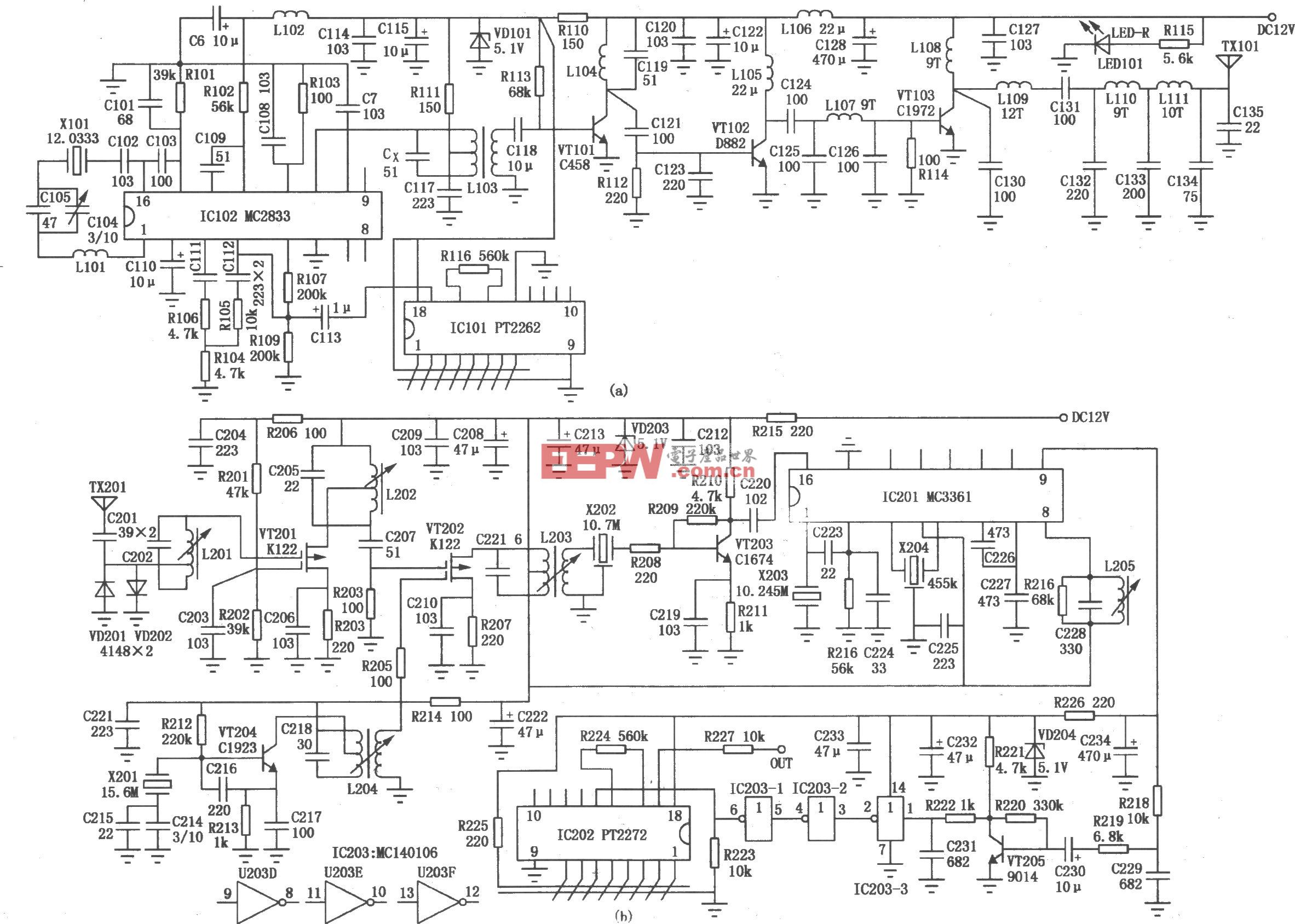



評論