Matlab GUI的上位機與智能車的兩種實時通信

3 單片機與PC機串行通信
3.1 設計思想
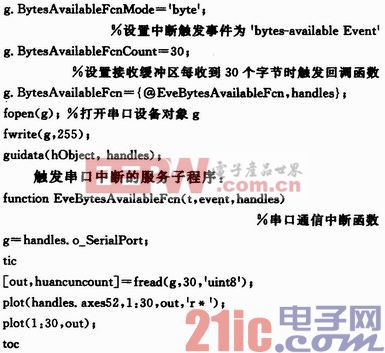
MCA8HCS12G128單片機的軟件設計需要實現對程序的初始化、接收與發送串口信號、速度和位置數據的采集等功能。為了保證上位機采集數據的可靠性和穩定性,防止出現丟包事件,在通信過程中約定了雙方的握手方法。在程序初始化以后,等待fwrite命令發送的握手信號0xFF。當單片機第一次接收到的信號為0xFF時,則握手成功,并開始運行電機和激光頭等子程序。在實驗過程中發現存在發送的第一組數據第一個字節丟失的現象,為了增強數據的可靠性,首先判斷數據包的前兩個字節是否為0xFF,是則剔除相應字節,分離出有效的數據,再在回送的速度、激光傳感器的數據中嵌入兩個字節的握手信號0xFF,Matlab接收到串口的數據后進行相應的處理。智能車控制器通信的總程序流程如圖3所示。本文引用地址:http://www.104case.com/article/170624.htm

數字通信相關文章:數字通信原理
通信相關文章:通信原理







評論