基于STM32單片機的工業循環水極化控制系統設計

PWM0、PWM1、PWM2、L1位置點、L2位置點、極化輸出u的波形如圖3所示。
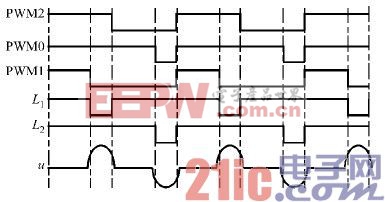
圖3 PWM0、PWM1、PWM2、L1位置點、L2位置點、極化輸出u的波形
為提高系統工作穩定性和抗干擾能力,并實現輸出電平的轉換,設計U3、U5光電耦合器,實現輸出PWM 信號的隔離傳輸。R2與R3、R6與R7分別組成分壓電路,實現對Q1、Q2的驅動功能,R4、C1、R8、C2組成阻容吸收保護電路,用于吸收升壓變壓器原邊線圈通斷產生的瞬時高電壓脈沖[4],從而保護Q1、Q2。
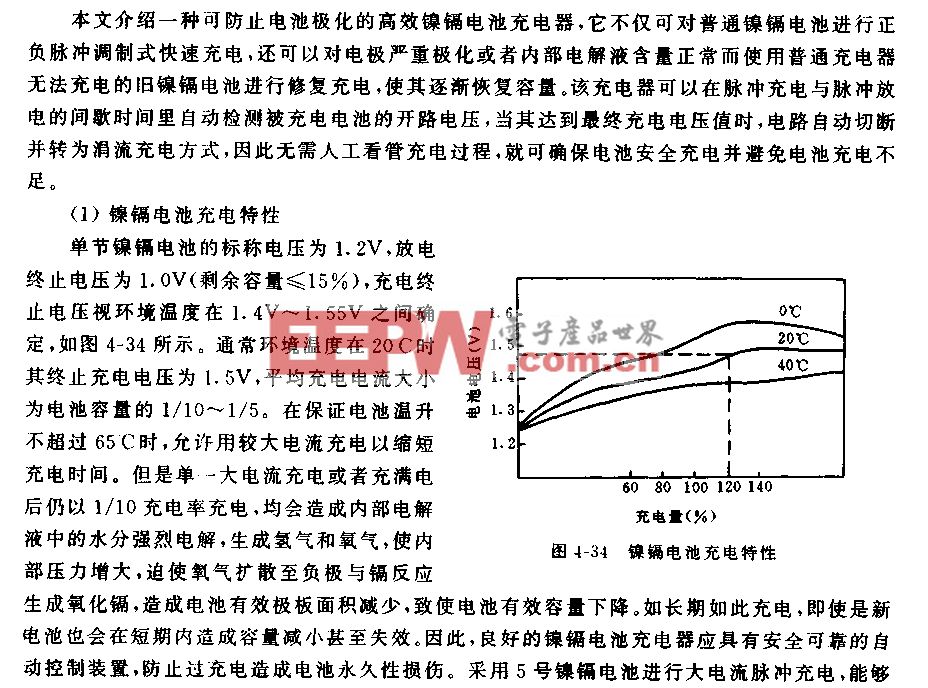
2.3 極化能量檢測電路
極化能量檢測電路由采樣電路、有源濾波電路、信號放大和限幅保護電路組成,如圖4所示。R9、R10構成采樣電路。R9、R10選擇精密、低溫漂的線繞電阻,以保證系統在較寬溫度環境下工作時信號采集的穩定、可靠。R11、C2、U6組成一階低通有源濾波電路,濾波器的截止頻率設計為45Hz,可有效濾除現場工頻50Hz干擾信號。限幅保護電路采用靜電釋放保護組件TVS,有效防止工業現場的大型電動機等設備啟停產生的高壓脈沖或信號超限而影響后級電路。
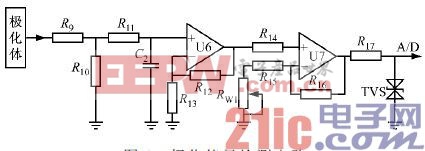
圖4 極化能量檢測電路
2.4 LCD顯示電路
LCD顯示電路采用專用段式液晶顯示屏,顯示內容包括設定極化值、極化能量運行值、授權運行時間等參數。LCD顯示由1片液晶驅動芯片HT1622完成,HT1622為一個32×8的LCD驅動器,內置RC振蕩器,提供1/4偏壓、1/8COM 周期[5],通過一條串行數據線、讀、寫及片選控制信號與STM32F103連接,同時通過RS485通信接口由上位計算機或觸摸屏HMI實時顯示水質參數及其它工作參數。
3 系統軟件設計
基于ARM 的極化控制系統軟件在KeiluVision4環境下開發[5]工業循環水,采用C語言編程、模塊化設計,主要程序模塊包括初始化模塊、極化能量數據采集模塊、定時數據采集及PID功能運算模塊、LCD顯示驅動模塊、保護功能模塊。
主程序的主要功能是完成I/O引腳配置、定時器工作模式和常數配置、串行口工作模式和啟動控制、PWM 工作模式、中斷源初始化及系統參數設置;LCD顯示驅動模塊實現參數的數據變換和顯示功能,包括驅動芯片的初始化、顯示位分離、轉換顯示字型碼、寫入顯示映像區。
由于該系統的極化能量輸出作用于工業循環水系統,其輸出效果反映為一個大慣性的滯后系統,因
此,極化能量輸出控制采用數字PID 調節控制方式,具體程序流程如圖5所示。
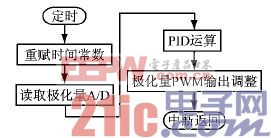
圖5 極化能量輸出控制子程序流程
4 結語
基于ARM 的工業循環水極化控制系統在某電廠循環水系統應用2臺(分別定義為設備A與設備
B),并停止在循環水系統加化學藥劑。該系統運行1年多來,其防垢、除垢、殺菌、滅藻的效果理想,在2011D09D06的部分整點運行數據如表1所示。

通過表1可看出,該系統可控制循環水在較高濃縮倍率(4.50~5.20)下運行,因此,可以減少污水的排放;由于循環水系統不再加藥處理,也避免了排放的水對河流等的污染。該系統實際運行效果說明其符合火電廠循環水現場運行要求。

陀螺儀相關文章:陀螺儀原理










評論