基于ARM9的自由擺平板控制系統的設計及實現

2.2 步進電機的PID 控制算法實現[6]
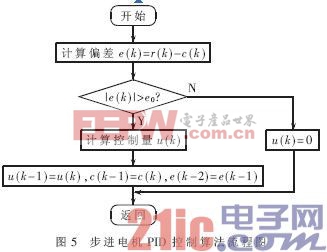
對于平板角度的調整是根據所采到的角度值和任務要求控制步進電機的轉動來實現的。而如果根據角度偏差e (k) 直接調整步進電機,則會帶來抖動、超調等問題, 故此考慮采用PID控制算法對步進電機進行調整。數字PID 算法如式(1)所示:

式(4)即為本系統所使用的PID 控制數學模型。系統進入穩態后, 偏差是很小的。如果偏差在一個很小的范圍內波動, 控制器讀到這樣微小的偏差計算后, 將會輸出一個微小的控制量, 此時輸出的控制值在一個很小的范圍內不斷改變自己的方向, 頻繁動作, 從而發生抖動,這樣不利于平板的精確控制, 因此, 當控制過程進入這種狀態時,就進入系統設定的一個輸出允許帶e0, 即當采集到的偏差|e(k)|
單擺一個擺動周期為2 s,步進電機旋轉1°需要4個脈沖,故此任務中只需控制脈沖輸出頻率為720 Hz即可完成單擺擺動一個周期平板尋轉一圈的要求。
2.4 硬幣疊放任務實現
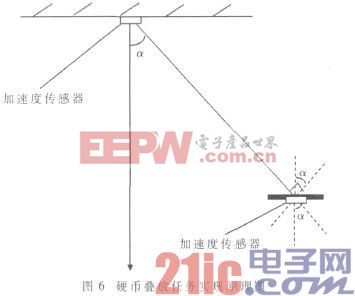
如圖6所示,將擺桿拉至一固定角度α(α在45°~60°之間),系統通過平板底部角度傳感器采集平板的傾角,根據PID算法控制步進電機將平板調至水平狀態。將8枚硬幣整齊疊放在平板中心位置,此時Z軸的加速度值等于1 g;放手后平板會略微傾斜,此時Z軸的加速度值小于1 g,因此可根據Z軸加速度值的大小判斷松手時刻,與此同時通過轉軸處的加速度傳感器采集擺桿與垂直方向的夾角(即擺角α),并控制步進電機偏轉α角度(即平板與擺桿垂直)。經受力分析可知,在平板與擺桿垂直狀態時,各枚硬幣X和Y方向所受合力均為0(即硬幣處于平衡狀態),硬幣不會從平板滑落(對應多枚模式)。
2.5 激光筆照射任務實現[7]
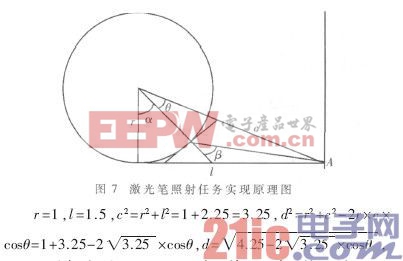
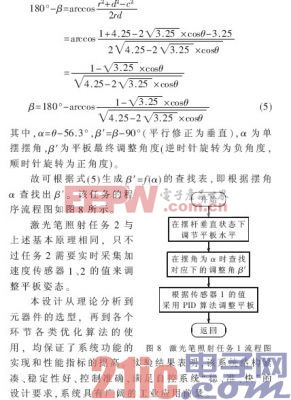
假設單擺的初始位置在56.3°(arctan(1/r)=56.3°) 處,此時單擺的擺尖正指向A 點處( 若擺角擺于56.3° 位置處則平板正好修正90°), 此時平板與單擺平行, 若單擺順時針轉動角度θ ( 如圖7 所示) , 平板若要指向A 點,則需逆時針轉動β 角度,β 和θ 的計算關系如下( 假設單擺與平板平行, 最后減去90°就與題目要求一致):

陀螺儀相關文章:陀螺儀原理









評論