基于非線性效應的光學邏輯門研究

基于馬赫-曾德干涉儀(Mach-Zehnder Interfer-ometers,MZI)的全光邏輯門的原理如圖3所示,SOA1和SOA2對稱放置在干涉儀兩臂,連續的探測光通過一個耦合器分解成兩束,注入到干涉儀兩臂,波長為λ1的兩路強度調制的信號光分別注入其中,信號光的峰值功率高于SOA的最大線性輸入功率,當輸入功率超過SOA的最大線性輸人功率時,SOA的有源區內載流子密度就會發生變化,使有源區內的有效折射率發生改變,導致通過SOA的探測光的強度和相位發生變化,探測光經過SOA就會攜帶上信號光的信息,兩路經過相位調制的探測光在耦合器中發生干涉,將相位轉移成振幅調制,完成兩路信號的異或運算。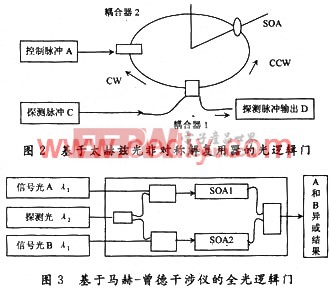
2.4 基于超快非線性干涉儀的全光邏輯門
超快非線性干涉儀(Ultrafast Nonlinear Interferometers,UNI)的工作原理如圖4所示,信號光經過起偏器保持一定方向的偏振態,經過雙折射光纖后分離成具有不同偏振態相互正交且有一定延時的兩路脈沖,其中一個脈沖先進入SOA,然后控制脈沖通過耦合器1輸入到SOA,接著相互正交的后一脈沖再進入SOA。由于前一脈沖強度小,SOA不會產生增益非線性,而后一脈沖將會遇到強的控制脈沖導致的SOA增益非線性,從而獲得一附加相移。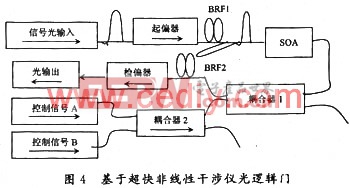
因此,當兩個脈沖經過快慢軸與雙折射光纖BRF1正交的BRF2后,重新在時間上重疊。由于兩個脈沖有相位差,當它們通過45°檢偏器后將會產生干涉,從而有輸出;反之,如果沒有控制脈沖,則這兩個脈沖將會遇到相同的增益特性,沒有相差,在檢偏器中不能形成干涉,因而也就沒有輸出。當利用超快非線性干涉儀作為邏輯門時,時鐘信號作為信號光輸入超快非線性干涉儀,再利用耦合器2輸入A和B兩個邏輯控制信號代替超快非線性干涉儀原來的控制信號,就可以獲得或門和異或門。
3 結 語
以上分析了幾種典型全光邏輯門的工作原理,其中,在利用半導體光放大器實現的全光邏輯門中,第二級半導體光放大器前置的摻鉺光纖放大器的輸入信號功率和消光比對邏輯與運算的輸出性能起決定性作用,而利用太赫茲光非對稱解復用器實現全光邏輯門方案,具有結構簡單、操作性強等優點,在實現邏輯操作的同時實現了波長轉換,最后探測光作為載波攜帶邏輯結果輸出,同時,此方案還具有擴展性,即能夠實現多個具有不同波長的數據流的操作,如果改用偏振無關的半導體光放大器,可實現偏振無關的邏輯門。基于超快非線性干涉儀的全光邏輯門,利用反向控制光實現全光或門和異或門,同時信號光和控制光可實現單一波長工作,加之采用了半導體光放大器,使得結構緊密,連同基于馬赫一曾德干涉儀的全光邏輯門,均具有便于集成的優點,用于未來的全光信號處理頗有前途。
主站蜘蛛池模板:
临西县|
古蔺县|
天等县|
沂源县|
岫岩|
温泉县|
星座|
通城县|
娄烦县|
上犹县|
万州区|
秦皇岛市|
连云港市|
宝应县|
余江县|
常山县|
运城市|
南涧|
南投县|
甘孜县|
宣城市|
卢龙县|
大邑县|
永定县|
和田县|
兴山县|
阿荣旗|
湘乡市|
武乡县|
衡山县|
江川县|
稷山县|
龙岩市|
遂溪县|
甘泉县|
中宁县|
交口县|
吐鲁番市|
屏东县|
香河县|
土默特左旗|










評論