一種基于光電編碼器雙路測量間距的方法

所謂間距測量,指的是測得相鄰兩個位置信號的位移。傳統(tǒng)的五輪儀均為單路測量,僅僅用一路的運行情況來決定結果,如果這路情況非常復雜,所反映的距離與實際位移存有偏差。考慮到地表不平主要包括尖峰和凹坑兩種情況,無論是哪種情況的影響都會使車輪運行表現出來的距離變大。為了有效克服單路測量過于片面的弊端,改為了雙路的同時檢測。由于各路地表情況存在差異,例如一路在某一間距內出現尖峰或是凹坑而另一路平直,那么檢測出的結果肯定是第二路反映的距離短于第一路,對應輸出的脈沖數少于第一路的,同時大于或等于實際值所對應的脈沖數,那么選擇第二路的測量結果會更接近真實值;如果兩路在行進中均遇到了尖峰或凹坑,測量結果也會因為行進距離的不同而出現差異,雖然這種情況兩路測量也會產生很大的誤差,但我們仍可以確定輸出脈沖少的那一路比較接近真實值;如果兩路均為平直的狀態(tài),那么雙路與單路的測量結果不會有太大的差異,選擇哪一路誤差都不會太大。雙路測量的優(yōu)勢在前兩種情況下體現的較為鮮明。
通過以上的討論可以歸出以下算法:
(1)將相鄰位置信號間得到的兩路脈沖數進行比較,如果存在差異,保存小值;如果不存在差異,任取一值(稱為最優(yōu)值選擇)作為最終轉換間距的數據(如圖1);
(2)由于每個脈沖對應編碼器旋轉了一定的角度,利用角度與輪緣周長的關系得到對應傳動機構行進的距離,即所測得的間距。公式為:
 為編碼器旋轉一圈輸出的總脈沖數, 為第ni次中斷時的脈沖個數,r為傳動機構的外圍半徑,s為間距。
為編碼器旋轉一圈輸出的總脈沖數, 為第ni次中斷時的脈沖個數,r為傳動機構的外圍半徑,s為間距。由于兩路編碼器起始點可能存在不一致,(取決于編碼器自身的設計結構),會造成一路脈沖上升沿來時,另一路的并沒有到,在計數脈沖時兩路會存在1/N(N為編碼器一圈輸出的脈沖數)的誤差,當N值越大,誤差越小。因此可以采用分辨率高的編碼器來降低這方面的影響。本文引用地址:http://www.104case.com/article/169420.htm
三、試驗及結果分析
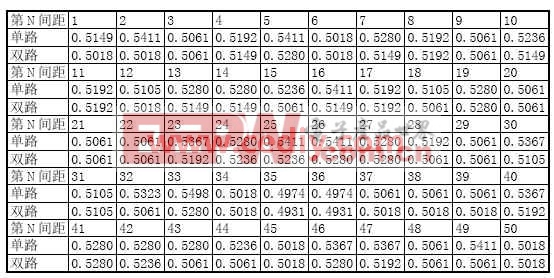
在田間進行雙路與單路的對比試驗,采用縱向等間距(S=0.5m)排列的51個紅外信號作為位置信號。已知行進輪的直徑為50cm,采用的編碼器為 omron公司生產的E6B2-CWZ6C型編碼器,它的輸出脈沖數為360p/r,即車輪旋轉一周裝置前進位移是1.57m。
結果如下表1:








評論