水下自適應(yīng)照明系統(tǒng)的設(shè)計

位置型PID算法其控制規(guī)律為:

在計算機(jī)控制系統(tǒng)中,使用的是數(shù)字PID控制器。由式(5-2)可得到離散化的PID表達(dá)式為:
 (5-3)
(5-3)
或
 (5-4)
(5-4)
式中,k為采樣序號,k=0,1,2…;P(k) 為第k次采樣時刻的計算機(jī)輸出值;E(k) 為第k次采樣時刻輸入的偏差值;E(k-1) 為第(k-1)次采樣時刻輸入的偏差值;KI為積分系數(shù),KI=KpT/TI;KD為微分系數(shù),KD=KpTD/T。
在計算機(jī)控制系統(tǒng)中,PID控制規(guī)律是用計算機(jī)程序來實現(xiàn)的,因此它的靈活性很大。一些原來在模擬PID控制器中無法實現(xiàn)的問題,在引入計算機(jī)以后,就可以得到解決,于是產(chǎn)生了一系列的改進(jìn)算法,滿足不同控制系統(tǒng)的需要。
在計算機(jī)控制系統(tǒng)中,為了避免系統(tǒng)控制動作的過于頻繁,消除由于頻繁動作所引起的振蕩,可采用帶死區(qū)的PID控制,相應(yīng)的控制算式為:
 (5-6)
(5-6)
式中,死區(qū)e0是一個可調(diào)的參數(shù),其具體數(shù)值可根據(jù)實際控制對象由實驗確定。若e0值太小,使控制動作過于頻繁,達(dá)不到穩(wěn)定被控對象的目的;若e0值太大,則系統(tǒng)將產(chǎn)生較大的滯后。此控制系統(tǒng)實際上是一個非線性系統(tǒng)。即當(dāng)|e(k)|≤| e0|時,數(shù)字調(diào)節(jié)器輸出為零;當(dāng)|e(k)|>| e0|時,數(shù)字調(diào)節(jié)器有PID輸出。
2.2.3 PID參數(shù)確定
對于一定的系統(tǒng),合理PID參數(shù)的組并不唯一。滿意的控制結(jié)果是相對于被控的對象和相應(yīng)的控制系統(tǒng)而言,另外,PID各參數(shù)對控制質(zhì)量的影響并不十分敏感,因此參數(shù)的選定沒有統(tǒng)一的標(biāo)準(zhǔn)。由于無法獲得LED面陣的精確數(shù)學(xué)模型,通過實驗仿真,在進(jìn)一步確定被控對象特性的基礎(chǔ)之上,我們采取湊試法確定PID參數(shù)。
2.2.3自適應(yīng)控制程序
水下自適應(yīng)照明系統(tǒng)控制算法選擇位置式PID控制算法,并進(jìn)行必要改良,加入帶死區(qū)PID控制。算法流程如圖4所示:
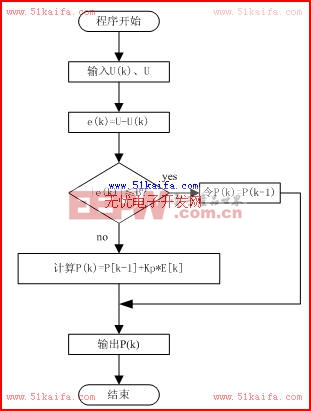
圖4 算法流程圖
3. 結(jié)論
2006年8月,系統(tǒng)在青島帆船賽中成功通過預(yù)演試驗。系統(tǒng)運行后,水下探測器傳輸回的視頻亮暗均勻,視頻比使用一般照明系統(tǒng)的視頻圖像質(zhì)量高。同時使用水下照度計進(jìn)行24小時長時間測試,反復(fù)測量結(jié)果證明,監(jiān)測區(qū)域的光照度變化在預(yù)定值的±8%范圍內(nèi),系統(tǒng)性能良好。






評論