一項基于光電管路徑識別的智能車系統設計

1.4 車速檢測模塊
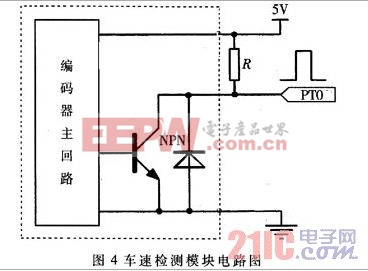
車速檢測模塊采用韓國Autonics公司的E30S-360-3-2型旋轉編碼器作為車速檢測器件。該旋轉編碼器硬件電路簡單、信號采集速度快,360線的精度足以滿足PI控制算法調節的需要。旋轉編碼器與直流驅動電機通過齒數為1:1的兩齒輪連接在一起,所以智能車車輪轉動一圈即可以用360個脈沖表示。因此一定時間內單片機累加器獲得的脈沖數值可以用來表示車速,并可直接作為控制器參數。圖4為車速檢測模塊硬件電路圖。
1.5 舵機控制模塊
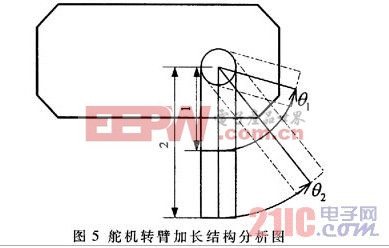
本系統使用SANWASRM102型舵機完成智能車轉向。舵機屬于位置伺服電機,控制信號是MC9S12DG128單片機產生的PWM信號。舵機自身硬件特性決定:在給定電壓一定時,空載和帶載時的角速度分別保持恒值,而線速度,正比于轉臂的長度R。當舵機所需轉動幅度一定時,長轉臂要比短轉臂轉動的角度小,即響應更快。如圖5所示,對于轉臂1和2,當R1。因此對于相同的角速度,可得轉臂響應時間t1>t2。顯然利用舵機的轉距余量可以提高系統整體的響應速度。
智能車在行駛過程中,舵機的響應時間決定著系統的穩定性及快速性。為了減小舵機的時滯現象,充分利用舵機的轉矩余量,本系統采用了以下三種方法:
(1)提高舵機工作電壓,使其工作在額定電壓之上,從而減小舵機的響應時間;
(2)將舵機轉臂加長至3.5cm,充分利用轉矩余量;
(3)將兩個8位PWM寄存器合并為一個16位PWM寄存器,將舵機的PWM控制周期放大至2000,從而細化PWM控制量,使轉臂變化更加靈活、均勻。
1.6 直流驅動電機控制模塊
本系統中,直流驅動電機控制模塊由RS-380SH型直流電機、功率驅動芯片ULN2003、電機驅動芯片MC33886及MC9S12DG128微處理器組成。
功率驅動芯片ULN2003為單片高電流增益雙極型大功率高速集成電路,本系統采用了其中兩組用于增強單片機輸出的PWM信號的驅動能力。
圖6為直流驅動電機硬件控制電路圖。
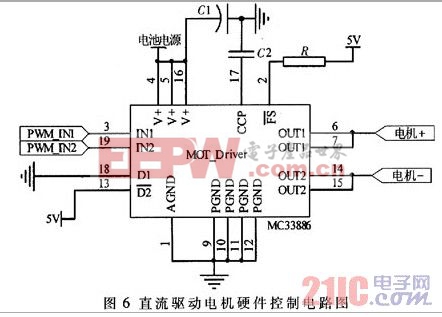
其中,電機驅動芯片MC33886是單片集成的H橋元件,它適用于驅動小馬力直流電機,并且有單橋和雙橋兩種控制方式。D1、D2為使能端,IN1、IN2為PWM信號控制輸入端,OUT1、OUT2為輸出端。由于智能車從直道高速進彎時需通過緊急降速來保證系統的穩定,所以電機正轉時必須能夠產生反向制動力矩。因此本系統選擇了MC33886的全橋工作方式。
當需要智能車減速時,PI控制器計算值為負,令PWM5輸出的PWM信號占空比為零,PWM3輸出的PWM信號占空比與計算值的絕對值相同,并且計算值越負,OUT2的電平高出OUT1越多,電機有反轉趨勢。反之,當需要智能車加速時,PI控制器計算值為正,PWM3輸出的PWM信號占空比為零,PWM5輸出的PWM信號占空比與計算值的絕對值相同,計算值越大,OUT1的電平高出OUT2越多,電機有正轉趨勢。







評論