伺服控制系統的硬件設計

在顯微鏡伺服系統中,硬件主要由電動機驅動控制系統、顯微鏡光源自動控制系統與分布式監控網絡系統三部分組成。為了保證所有的控制系統既可單獨工作,又可同時工作的要求,采用了多單片機組成的分布式通信網絡,通過RS-232通信接口,直接接受PC的統一管理。考慮到成本問題,選用了性價比很高的AT89C2051單片機I/O端口及可以在PC上進行通信的UART通信端口。
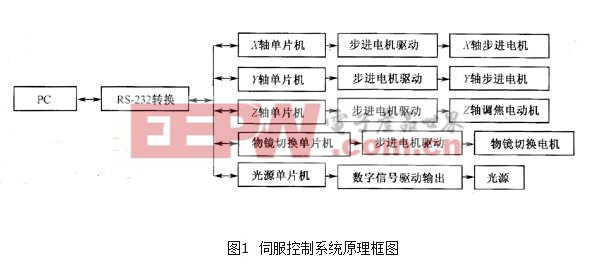
本文引用地址:http://www.104case.com/article/167613.htm在電機驅動控制系統中,用四個步進電動機分別控制顯微鏡載物臺在X軸和y軸方向上的平面運動,在Z軸方向上的調焦運動與物鏡的選擇切換。每一個步進電動機用一個AT89C⒛51單片機來單獨管理其運行狀態及移動的位置,其驅動環節電路框圖如圖1所示。和y軸兩個方向上的開環位移進行控制;可通過計算機圖像的灰度值閉環控制物鏡的上下移動,以實現自動調焦;物鏡轉換器可自動切換;通過載物臺在X軸和y軸兩個方向上的二維移動,再加上在Z軸方向上的實時自動跟蹤調焦,可實現對觀察物(切片或培養皿)進行實時掃描,使整個觀察過程能顯示出清晰的圖像;通過預先設定載物臺的運動規則,使顯微鏡能按程序觀察到規定的視場;通過快速接近(相當于粗調)或精細調節(相當于微調)兩種方式可自動精確調焦和自動跟蹤調焦(調焦精度小于0.5 gm);單片機控制電路和計數脈沖及在X軸和y軸兩方向上的重復定位精度(±0.02 mm)能滿足醫學臨床檢驗的需要;可聯網進行遠程遙控顯微鏡,以利于醫學學術交流或教學交流。
伺服控制系統的原理框圖如圖1所示,圖中的虛線框是顯微鏡的伺服控制系統,它通過分布式微控制器系統網絡來驅動顯微鏡平臺的精確運動,具有自動精確調焦和自動跟蹤調焦的功能。
由CCD采集到的圖像經圖像采集卡送入計算機,PC根據算法分析當前圖像的清晰度。若圖像不是最清晰的,則PC通過RS-232通信端口發送調焦命令送給微控制器系統,微控制器系統把相應的控制信號傳送給Z軸調焦電機,由Z軸調焦電動機推動調焦機構做相應的運動,從而改變圖像的清晰度。如此反復的由PC與伺服系統共同作用,直至找到圖像最清晰的位置為止,從而完成自動精確調焦的全過程。由PC發送命令,通過控制x軸和y軸步進電機的運動可改變觀察視場。在改變視場的過程中,PC自動跟蹤圖像的清晰度,以保證物鏡處于最佳成像位置。








評論