基于Autoface的捷聯慣導顯控系統設計


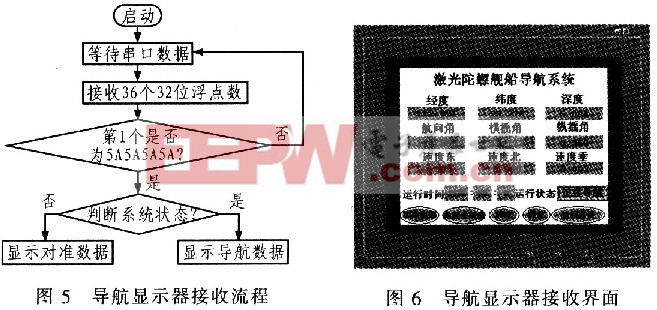
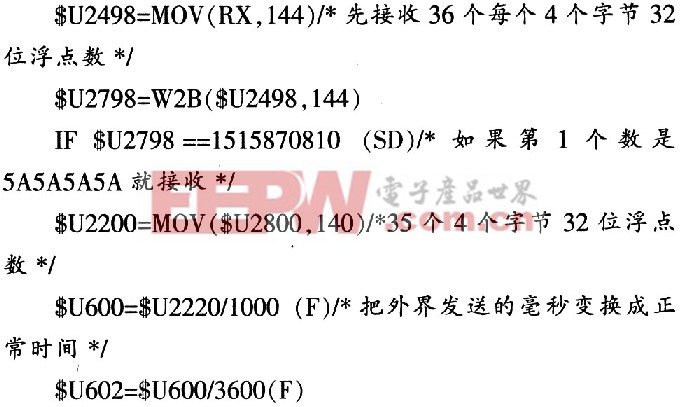
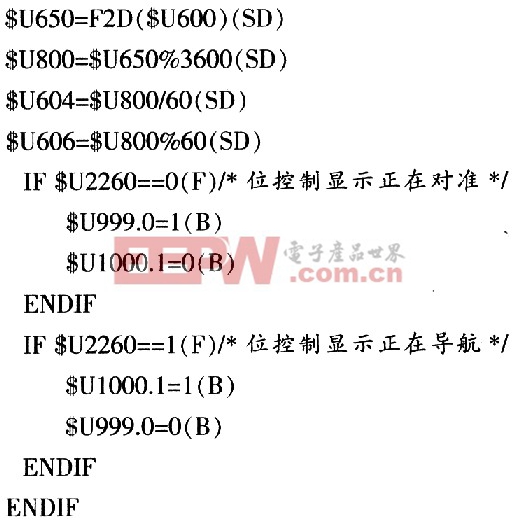
主體導航系統接收到工作命令后會正常工作,同時傳輸原始的導航參數,這時PC104接收這些導航參數并進行參數解算,解算后將實際參數傳給VT5057L,觸摸屏的顯示階段流程如圖5所示。圖6為導航顯示器實際接收的導航結果。為了消除環節因素以及通信誤碼對PC104和VT5-057L之間的傳輸產生影響,增加了校驗功能,顯示階段宏命令代碼如下:本文引用地址:http://www.104case.com/article/166632.htm
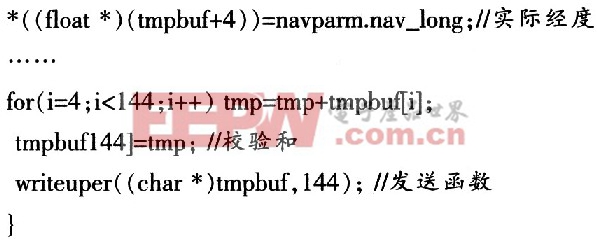
導航數據處理計算機的軟件采用VC++編寫,在DOS下使用TC3.1調試。由于實際的戰場環境可能變化無常,整個系統的數據通信量又非常大,主體導航系統和顯控系統都可能出現各種問題從而導致數據傳輸出錯;為了防止此類事情的發生,在導航計算機內部也增加了數據校驗環節,發送函數代碼如下:
3 結論
本文設計了一種基于觸摸屏和PC104的顯控系統,給出了PC104計算模塊的框架結構和觸摸屏及導航計算機軟件編寫流程,二者通過RS-232串口雙向通信,經過4000小時不間斷測試,數據顯示依然正常。該顯控系統體積小、重量輕、可靠性高,可應用于海軍艦艇慣導系統。







評論