基于BF561的智能視頻監控儀的設計

行為識別:遍歷目標鏈的每個目標,判斷連續各幀之間運動目標的質心位移方向和距離,得出目標的運動軌跡。根據設置好的規則和運動軌跡,判斷目標是否滿足觸發報警的條件。
目標跟蹤:在許多監控場景,要求攝像頭隨著運動目標移動,防止目標運動超出攝像頭的視場范圍內,從而要求云臺隨著目標的運動而運動。在本設計中,這種情況下只能由多目標跟蹤轉為單目標跟蹤。目前用于圖像跟蹤的方法比較多,相關跟蹤是一種常用的、有效的和快速的目標跟蹤方法。本文采用改進的多模板匹配法對目標進行跟蹤,使用多子模板匹配[4]和二值化信息不斷修正模板的方法有效地解決了由于模板滑動帶來的模板更新問題;采用歸一化互相關系數度量模板的相似度;為了克服遮擋問題和提高跟蹤的準確性和實時性,采用Kalman濾波器估計目標的運動狀態[5],有效地縮小了目標的搜索范圍。目標在單位時間內(本文的間隔時間是3幀)其運動狀態變化較小,可以認為在單位時間間隔內目標是做勻速運動的,可以建立卡爾曼濾波器模型。觀測向量為模板匹配運算后目標的位置,狀態向量為目標實際位置和當前的水平垂直速度,為了提高運算速度,分別對水平方向位置和垂直方向位置進行卡爾曼預測。
2.2 軟件流程
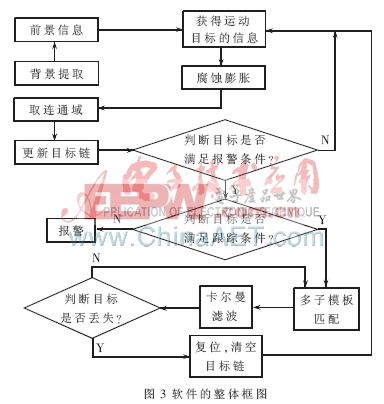
BF561的視頻監控處理流程如圖3所示。首先BF561收到FPGA傳來的1幀圖像,接著BF561讀取本幀圖像的二值化信息,通過腐蝕膨脹函數和取連通域函數target_mark(),得到當前幀運動目標的大小、重心和位置等信息,然后通過target_update()函數更新目標鏈,采用基于區域的算法,判斷連續的各幀之間運動物體的質心位移方向和距離,判斷目標的狀態,判斷是新目標、原有目標、目標發生合并、目標發生遮擋和目標丟失等。完成目標鏈的更新后,進入規則檢測函數rule_check(),根據目標的軌跡信息判斷目標鏈中的目標是否滿足報警條件,若滿足報警條件,給出各種報警信號,若不滿足,則返回,等待下一次循環。通過對物體運動軌跡的記錄,可以實現入侵檢測,人、車數量統計,遺留物體檢測,攝像頭非法遮擋和移位報警等功能。若要實時跟蹤目標,則進入target_track()函數,采用卡爾曼濾波器對目標位置進行預測和改進的多子模板匹配算法得到目標的實際位置,控制云臺運動保證目標的連續跟蹤。實驗結果如圖4所示,表明本設計能準確、實時地跟蹤目標。本文引用地址:http://www.104case.com/article/166542.htm

本設計實現了智能視頻監控儀。其獨立的硬件設計結構和豐富的接口,使本平臺不僅可用于智能化當前監控系統,也可獨立構建新的網絡化、智能化的監控系統。
參考文獻
[1] Analog Device. ADSP-BF561 processor hardware refefence [EB/OL].[2008-02-05] http://www.analog.com
[2] 彭征,朱秀昌.雙核DSP BF-561上XGA視頻編碼的實現[J].電視技術,2009,33(1):32-34.
[3] STAUFFER C, GRIMSON W. Adaptive background mixture models for real-time tracking.In:Proc[C]. IEEE Conference on Computer Vision and Pattern Recognition, Fort Collins, Colrado,1999:246-252.
[4] 熊旭杰.圖像相關跟蹤算法的改進研究[D].武漢:華中科技大學,2007:21-32.
[5] 孫海燕,傅得勝.視頻監控系統中的多目標跟蹤技術[J].計算機應用與軟件,2005(11):22-23.

評論