基于視頻采集系統的肢體運動模型

通過擬合的曲線求得的相關函數關系如下:

4 模型的仿真與結果驗證
仿真與結果檢驗,是實現模型的一個關鍵步驟,也是實現假肢設計的一個重要環節。仿真目的是模擬一個角度不斷變化的大腿,通過檢測大腿的角度來利用已建立的函數模型,控制小腿擺動。在該控制過程中,由于膝關節的位置在走動時會不斷運動,會導致坐標系的變換,為更好地實現和準確地表示變換后的坐標系,將大小腿的長度引入到坐標的變換中,即根據大小腿長度來計算小腿將要調整的角度和踝關節所在的坐標,坐標變換的方程組如下
 本文引用地址:http://www.104case.com/article/165987.htm
本文引用地址:http://www.104case.com/article/165987.htm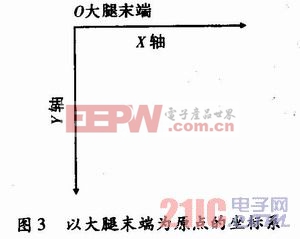
式中,θ為大腿與豎直方向的夾角;α為模型控制計算出的小腿與豎直方向的夾角;A為大腿長度;B為小腿長度;(X,Y)為以大腿末端作為坐標原點的標系中的位置。
通過踝關節坐標變換建立的模型在仿真中可以觀察到大腿的運動狀態對小腿的姿態進行控制。為驗證模型的正確性,采用單片機控制步進電機運動的方式在機器人關節上設計一個模仿大腿擺動過程的程序模擬大腿擺動,通過固定在機器人大腿上的傾角傳感器來檢測模擬大腿的角度變化,通過STC89C52單片機根據已建立的大小腿運動函數關系控制安裝在機器人膝關節上的舵機,驅動小腿擺動。觀察結果表明,在一定精度范圍內模擬小腿的運動姿態,符合人腿的運動模式,說明通過人腿模型采集系統建立的運動模型是可行的,該肢體模型函數能夠應用于假肢的設計中。
5 結束語
基于視頻采集系統的肢體建模實現了—種精準度高,誤差較小的建立肢體運動模型的方法,為研究肢體運動提供了方向,也為實現低成本假肢的設計打下基礎。







評論