基于DSP的運動控制器的研究與開發

2.1 系統軟件功能設計 運動控制器通常作為一個獨立的過程控制單元用于工業自動化生產中,它的功能是由硬件和軟件共同實現的硬件為軟件運,行提供了支撐環境,軟件負責實現系統要求的所有功能。本系統軟件需要完成控制和管理兩大任務,圖 2 表示的是其軟件功能結構。
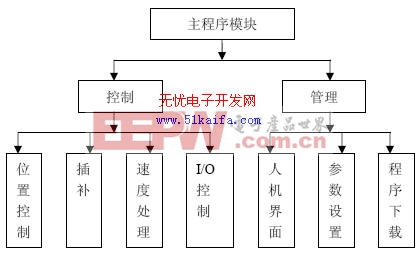
其中,系統的控制包括位置控制、插補、速度處理和開關量 I/O 控制等,這類任務的實 時性很強,所以軟件程序的優先級也較高;系統的管理包括人機界面顯示、參數設置和程序 下載等,這類任務的實時性要求不高,所以軟件程序的優先級也相對較低。可以說,一個運 動控制系統的基本功能均由上述功能的子程序實現,通過增加子程序可進一步增加系統的功 能。
要實現這些功能,必須做好運動控制器的軟件規劃,劃分各個功能模塊,才能在 DSP 芯片上設計運行程序。本系統軟件主要分為兩個層次,包括 PC 層軟件和 DSP 層軟件,其中PC 層軟件在單板式運動控制中主要實現加工程序的傳輸和下載等功能;在插卡式運動控制中,除此之外,還需實現加工情況顯示、加工命令發送等人機交互界面的功能。 運動控制器的主要功能由 DSP 層完成,本課題的主要任務也是 DSP 層軟件的程序實現,具體包括:
1.運動控制 運動控制功能是運動控制器的主要功能,包括位置控制、插補和輔助功能的輸入輸出I/O 控制。本系統基本功能是實現 XYZ 三軸的運動控制,包括三軸聯動的直線插補運動和任意兩軸圓弧插補運動,可以實現步進電機的運動控制,提供單脈沖(即脈沖+方向)和雙脈 沖(即脈沖+脈沖)兩種控制方式。
2.速度控制
速度控制即調速,利用加減速算法,實現系統的平穩運動。系統設計空行程時的運動速度不小于 100KHz,加工過程中的插補運動速度不小于 40KHz;當脈沖當量為 2.5 微米時可達到的空行程和加工的最高速度分別為 15m/min 和 6m/min。
3.通信功能
運動控制器不是一個孤立封閉的系統,它必須和外界交換數據,主機通信主要完成兩個 任務:一個是程序的下載,另一個是控制指令的發送和加工狀態的反饋。根據單板式控制和插卡式控制兩種不同的應用,分別有不同的通信方式。其中,在單板式控制中,通過 USB總線進行程序下載而通過串口進行控制指令的發送和加工狀態的反饋;在插卡式控制中,兩種任務都是由 PCI 總線來完成。本系統的多用性特點主要體現在通信方式的不同上,支持PCI 總線方式、USB 總線方式以及異步串行總線方式,供用戶自由選擇。
4.參數設置 作為開放式運動控制器,應該允許用戶對控制系統的各運動參數進行實時調整與修改。
本系統設計將各參數存放在 FLASH 中,允許用戶通過人機界面對參數進行修改,修改后的參數將在下次操作中起作用。
2.2 系統軟件層次設計
DSP 軟件采用模塊化和層次化的設計思路,為使結構清晰,整個系統軟件按功能群分割為多個文件分別處理和完成相應的任務,主要分為三個層次:
1.主控層:不涉及具體操作,只負責各個任務調度、中斷安排、時間和優先級處理等, 主控層只有一個文件 main.c,包括主函數和中斷函數,在主函數和中斷函數中調用算法層的函數來實現系統的各個功能。
2.算法層:負責具體任務執行,控制算法實現,系統的主要功能都在算法層實現,包 含的模塊由系統要求的各個功能來決定,算法層主要用以實現運動控制、速度控制和系統管理等功能,各模塊之間通過標志位來聯系,不互相調用。
3.接口層:負責與硬件的接口,所有與外設有關的操作都在該層進行處理,接口層中 包括 DSP 硬件資源的定義、系統硬件的驅動等。除接口層外,系統其它層的程序禁止直接對外設進行操作,接口層直接對外設進行操作的函數盡可能做到功能完善。 綜上所述,本系統根據以上功能和層次進行軟件設計并遵循以下原則:
(1)全局性:盡量保證系統各模塊負載均衡;
(2)正確性:數學推導嚴密,盡可能利用試驗驗證;
(3)結構化:軟件設計做到層次化、模塊化、封裝化;
(4)規范性:保證程序的易讀性、移植性和可維護性。
3 小結:
本文作者創新點是運動控制是數控技術的核心,近年來,隨著開放式數控系統的發展, 開放式運動控制器也得到了前所未有的發展。運動控制器作為一個獨立的工業自動化控制類標準部件,已經被越來越多的產業領域接受,并形成了令人矚目的市場規模。本文介紹了運動控制器的總體設計方案,包括運動控制器的硬件平臺以及軟件設計思路。










評論