智能巡線(xiàn)小車(chē)的多模式速度控制系統(tǒng)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
本設(shè)計(jì)中使用兩片MC33886 并聯(lián),一方面進(jìn)一步減小導(dǎo)通電阻對(duì)電機(jī)特性的影響,另一方面減小過(guò)流保護(hù)電路對(duì)電機(jī)啟動(dòng)及制動(dòng)時(shí)的影響【2】。
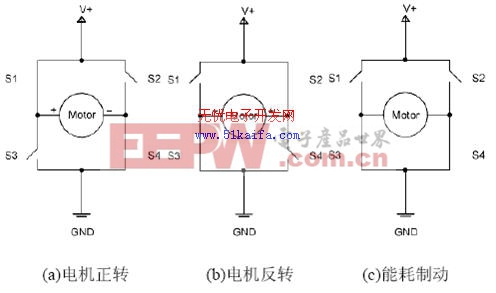
圖3 簡(jiǎn)化的H橋電路
2.2 速度檢測(cè)模塊
通過(guò)在電機(jī)驅(qū)動(dòng)軸的齒輪上加裝小型旋轉(zhuǎn)編碼器,使旋轉(zhuǎn)編碼器齒輪與電機(jī)驅(qū)動(dòng)軸的齒輪進(jìn)行嚙合。這樣,就可通過(guò)實(shí)驗(yàn)測(cè)定每個(gè)脈沖對(duì)應(yīng)的智能小車(chē)運(yùn)行的距離;同時(shí),可設(shè)定一個(gè)合適的定時(shí)中斷作為脈沖采樣周期,根據(jù)每個(gè)采樣周期內(nèi)旋轉(zhuǎn)編碼器的輸出脈沖個(gè)數(shù)就可計(jì)算出智能小車(chē)的實(shí)際速度,這樣就使脈沖個(gè)數(shù)和智能小車(chē)實(shí)際速度具有了明確的對(duì)應(yīng)關(guān)系,實(shí)際操作、測(cè)量非常方便。在本設(shè)計(jì)中,選用了OMRON E6A2-CS3E旋轉(zhuǎn)編碼器,該編碼器采用5v 供電,單相輸出,每圈輸出60個(gè)脈沖,用在本系統(tǒng)中比較合適【3】。在采樣周期的選取中,考慮到脈沖計(jì)數(shù)器所能允許的最大值及脈沖計(jì)數(shù)值要參與實(shí)際的運(yùn)算,為了避免數(shù)據(jù)溢出,采樣周期不能選取過(guò)大。
2.3 無(wú)線(xiàn)通信模塊
本系統(tǒng)中的無(wú)線(xiàn)通信模塊是基于nRF403的無(wú)線(xiàn)數(shù)據(jù)傳輸模塊,并在此基礎(chǔ)上實(shí)現(xiàn)了MODBUS 通信協(xié)議。該模塊在智能小車(chē)參數(shù)測(cè)試及程序調(diào)試的過(guò)程中起到了很大的作用。在智能小車(chē)運(yùn)行的過(guò)程中,可以通過(guò)下位機(jī)將與小車(chē)運(yùn)行狀態(tài)有關(guān)的各項(xiàng)參數(shù)發(fā)送到上位機(jī),并可通過(guò)簡(jiǎn)單的VB程序在上位機(jī)上顯示出相應(yīng)的狀態(tài)曲線(xiàn),從而達(dá)到對(duì)智能小車(chē)的運(yùn)行狀態(tài)進(jìn)行實(shí)時(shí)監(jiān)測(cè)的目的。在PID參數(shù)整定過(guò)程中,根據(jù)小車(chē)的實(shí)際運(yùn)行狀態(tài)和P、I、D參數(shù)對(duì)控制系統(tǒng)的影響,可以通過(guò)上位機(jī)來(lái)改變下位機(jī)的P、I、D參數(shù)而不用重新燒寫(xiě)程序,給系統(tǒng)的在線(xiàn)調(diào)試帶來(lái)了很大的方便。
3 控制系統(tǒng)軟件設(shè)計(jì)
HCS12單片機(jī)內(nèi)置PWM模塊,在程序中只需調(diào)用相關(guān)函數(shù)設(shè)定PWM周期和寫(xiě)入PWM占空比的值,就可以產(chǎn)生實(shí)際需要的PWM波【4】。考慮到有多模式調(diào)節(jié),對(duì)閉環(huán)控制的響應(yīng)速度要求不高,閉環(huán)控制采用了速度單閉環(huán)控制和位置式的PI控制算法,PI運(yùn)算的結(jié)果作為PWM占空比的設(shè)定值。采用速度單閉環(huán)控制既達(dá)到了多模式調(diào)節(jié)中閉環(huán)運(yùn)行模式的效果,同時(shí)也降低了系統(tǒng)設(shè)計(jì)的復(fù)雜性。在PI控制算法中,P、I參數(shù)整定的比較弱,這樣智能小車(chē)在過(guò)彎時(shí)的速度有一定的自然降落,可以防止智能小車(chē)脫離軌道。控制系統(tǒng)程序主要采用C語(yǔ)言編寫(xiě),PI控制算法程序流程圖如圖4【5】。本文設(shè)計(jì)的多模式速度控制系統(tǒng),可以作為一個(gè)比較完整的模塊調(diào)用,這樣很容易與路徑檢測(cè)系統(tǒng)相結(jié)合,形成完整的具有自主巡線(xiàn)功能的智能小車(chē)。
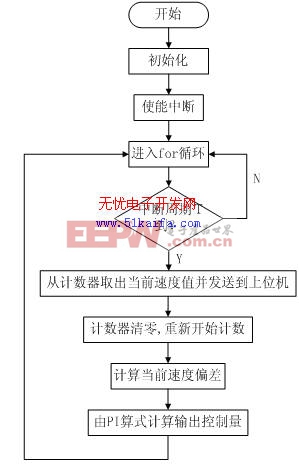
圖4 PI控制算法程序流程圖
本控制系統(tǒng)選擇了一通過(guò)CMOS攝像頭進(jìn)行道路識(shí)別的智能小車(chē)進(jìn)行實(shí)驗(yàn),通過(guò)多次實(shí)驗(yàn)及觀察得出:速度偏差在±5%以?xún)?nèi)智能小車(chē)運(yùn)行在速度閉環(huán)模式,小于-5%切換到開(kāi)環(huán)加速模式,大于5%且小于6%切換到能耗制動(dòng)模式,大于6%切換到反接制動(dòng)模式,這樣可以使智能小車(chē)在不脫離軌道的情況下達(dá)到較快的速度,具有較好的穩(wěn)定性和快速跟隨性能。
4 總結(jié)
本文的創(chuàng)新點(diǎn)在于,設(shè)計(jì)的速度控制系統(tǒng)具有四種速度模式:1、開(kāi)環(huán)加速模式2、反接制動(dòng)模式3、能耗制動(dòng)模式4、速度閉環(huán)運(yùn)行模式。該多模式速度控制系統(tǒng)可以使智能小車(chē)在任何兩種速度模式之間進(jìn)行快速的切換,同時(shí)保證智能小車(chē)仍能很穩(wěn)定地運(yùn)行。該多模式速度控制系統(tǒng)適用于多種類(lèi)型的智能小車(chē),可以使智能小車(chē)根據(jù)路面條件的變化,在速度調(diào)節(jié)上具有更好的靈活性。









評(píng)論