CPLD 實現 GPIB 控制器的設計

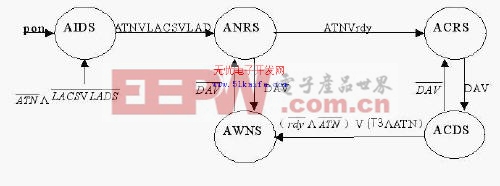
圖 1 AH 功能狀態圖
其狀態轉換的 VHDL 語言描述如下:
process(c_state,n_state)
begin AIDS='0';ANRS='0';AWNS='0';ACDS='0';ACRS='0'; case c_state is
when s1=>AIDS='1';NRFD='1';NDAC='1';
IF (ATN OR LACS OR LADS)='1' then n_state=s2;
else n_state=s1; end if;
when s2=>ANRS='1';NRFD='0';NDAC='0';
IF ((ATN OR rdy) and not tcs)= '1' then n_state=s3;
elsif DAV='1' then n_state=s5;
else n_state=s2; end if;
when s3=>ACRS='1';NRFD='1';NDAC='0'; IF DAV='1' then n_state=s4;
ELSIF (NOT ATN AND NOT rdy)='1' THEN n_state=s2;
else n_state=s3; end if;
when s4=>ACDS='1';NRFD='0';NDAC='0';
IF ((ATN AND T3) OR (NOT ATN AND NOT rdy))='1' THEN n_state=s5;
else n_state=s4; end if;
when s5=>AWNS='1';NRFD='0';NDAC='1'; IF DAV='0' then n_state=s2;
else n_state=s5; end if;
end case;
end process; 根據儀器的具體要求,由于大多數測試系統只要求被遠控,并不要求控功能,而并查功
能在系統組建中屬于可選項,很少用到,為了簡化系統,設計中徹底去掉此兩項功能。其他
功能模塊包括:講者功能(T)、聽者功能(L)、源方掛鉤功能(SH)、受方掛鉤功能(AH)、 服務請求功能(SR)、、遠控本控功能(RL)、設備觸發功能(DT)和設備清除功能(DC)。
其設計原理與 AH 相同,在這里就不做詳細論述。
2.4 輔助命令譯碼器與多線消息譯碼器
1.輔助命令譯碼器通過對輔助命令寄存器 F0 到 F4 位的譯碼來生成輔助命令。 輔助命令共有 stactic 和 pulse 兩種,即靜態和脈沖兩種信號,靜態命令用電平的高低來表示。而動態命令則通過一個周期的方波脈沖信號來產生,要求脈沖命令至少在寫完輔助命令 寄存器后保持一個周期。我們通過 VHDL 語言來完成本模塊的設計。
2.多線消息是處于相互排斥的編碼集中但又公用一組信號線來傳遞的消息。在母線上,
每一時刻只能傳遞一條多線消息(一個消息拜特)。多線消息在遠地消息譯碼單元內進行譯碼。 在這個譯碼單元,通過消息傳遞單元(DIO 線)來接收母線上的消息。消息譯碼單元僅在命令工作方式下(ATN=真)期間起作用。這樣的接口消息可能是地址、通令、專令或副令之一。
在數據工作方式(ATN=假)中,數據線上攜帶器件消息,這時譯碼單元不起作用。在本 GPIB
控制器設計中,此模塊還包含了地址比較器,這樣可以得到內部狀態機所需的與地址相關的 信號。用 VHDL 語言完成其設計,并例化成模塊。










評論