基于神經網絡的自適應滑模逆控制器設計

在導彈飛行控制中,由于參數變化劇烈, 和 無法準確得到。RBF[6]神經網絡對非線性系統具有唯一最佳逼近的特性。所以,構造RBF神經網絡,使其輸出 和 來逼近 和 。RBF網絡模型如圖1所示: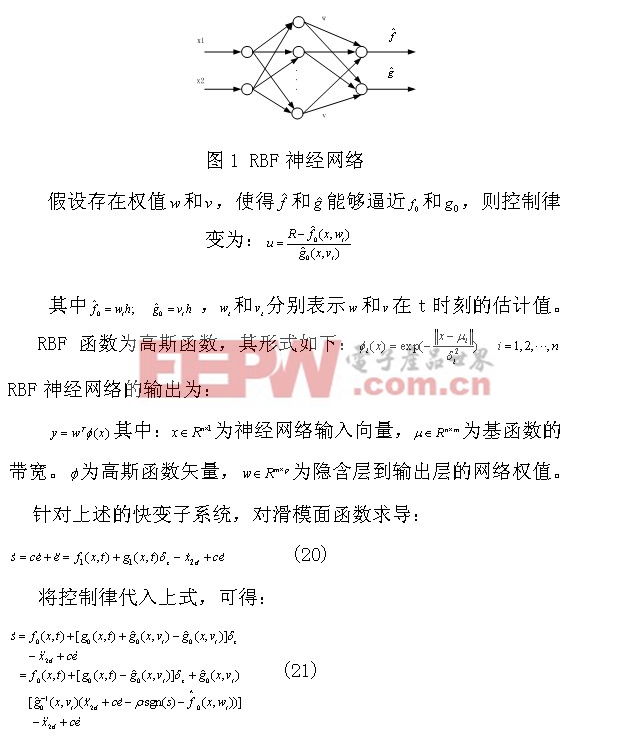
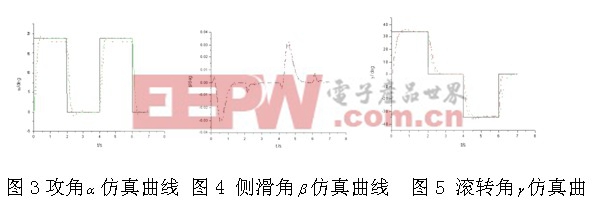
5、仿真結果分析
5、仿真結果分析
6、結論
主站蜘蛛池模板:
丹棱县|
铁岭市|
肇源县|
黔南|
陈巴尔虎旗|
紫云|
乌兰察布市|
磐安县|
平武县|
绥德县|
韶山市|
连平县|
东辽县|
扎兰屯市|
常熟市|
承德县|
盐池县|
康定县|
菏泽市|
灵璧县|
六枝特区|
饶平县|
龙山县|
南昌县|
霸州市|
南部县|
庆元县|
津南区|
南岸区|
舒兰市|
瓮安县|
积石山|
安远县|
青海省|
盐边县|
萨嘎县|
阿拉善右旗|
汝城县|
城固县|
乌鲁木齐市|
修武县|
基于導彈非線性控制模型,應用時標分離動態逆方法設計了一種非線性導彈控制系統。該方法通過引入神經網絡,將動態逆方法與自適應滑模控制相結合,有效的消除了建模誤差對整個系統的不利影響,增強了控制系統的魯棒性,適合于復雜的導彈控制系統設計,具有良好的應用前景。












評論