電力電子變壓器并聯(lián)運行動態(tài)仿真

3.2 PET2加入并聯(lián)運行(情況2)
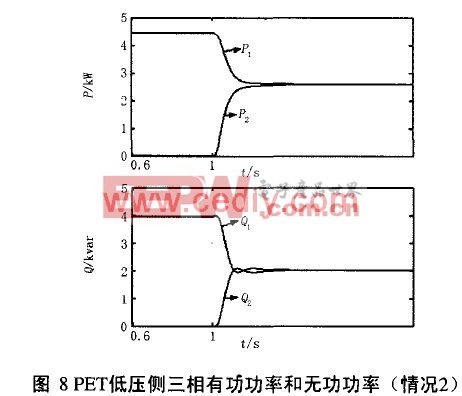
PET1帶載運行,1.0s時PET2由空載狀態(tài)投入,兩臺PET并聯(lián)運行。有關波形如圖7和圖8所示。由圖可見,PET1由單機運行狀態(tài)切換至并聯(lián)運行狀態(tài)后,其承擔的負載電流、有功和無功負荷均有所下降,下降部分由PET2來承擔,最終兩臺并聯(lián)PET之間實現(xiàn)了均流控制以及有功、無功負荷的穩(wěn)定分配且具有良好的動態(tài)響應性能。

4 結 論
本文基于有功和無功調差特性方程建立了PET控制策略及模型,基于該模型對PET并聯(lián)運行動態(tài)過程進行仿真研究。仿真結果表明,該控制策略可以在保持額定供電頻率的前提下,實現(xiàn)有功、 無功負荷的穩(wěn)定分配,且動態(tài)特性良好。







評論