一種基于CAN總線的集散型火災報警控制系統

1、系統組成與工作原理概述
本文引用地址:http://www.104case.com/article/163638.htm本文提出的基于CAN現場總線的集散型火災報警控制系統的網絡結構如圖1所示,每個節點都以AT89C51單片機為節點控制器,MCP2510為總線控制器,MCP2551為總線收發器,其中,與控制臺工作站相連接的節點被稱為集中機,其余為區域機。在集中機中,所謂控制臺工作站,就是一臺PC機,單片機通過外部串行接口與控制臺工作站交換信息。各個區域機分布在不同的地理位置上,獨立地執行一個完整的任務。在本文系統中,一個區域機通過一種專門設計的探測器總線可以連接感煙、感光、感溫等各種火警探測器,還可以借助適配器控制諸如噴水閥、卷簾門等各種消防設備以及各種聲光報警設備,探測器總線上的設備通稱為前端設備。利用CAN通信技術將區域機聯網,管理人員在集中機上就可以觀察各個部分的情況,便于管理和檢測,隨時可以了解到各區域機運行的是否正常,有無報警發生,也可以使各個區域機通過信息交互,實現資源共享,聯防控制。每個區域機都是一個獨立的基本報警控制單元,其功能與單獨使用時的情況完全一樣,它們從本區域機的探測器上采集數據,如有警情出現,在啟動本區的有關消防設備的同時,通過CAN總線將報警信號傳送給集中機,集中機再決定需要起動的由其它區域機管轄的有關消防設備,并通過CAN總線發出聯動命令。另外,由于CAN總線是基于報文的,總線上的節點可以做到即插即用,因而系統的可擴展性比較好;并且,增刪CAN總線上除集中機以外的任何一個節點,不會對其它的節點造成任何影響。
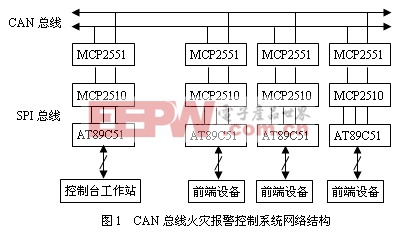
圖1中的MCP2510是Microchip公司為簡化CAN總線的接口應用而專門設計的一種獨立CAN控制器芯片,支持CAN協議2.0A/2.0B,最大可編程波特率為1Mbps;MCP2551是Microchip公司生產的可容錯的高速CAN總線收發器芯片,支持1Mbps的運行速率,可連接高達112個節點,適合12V和24V系統,管腳特性與MCP2510完全兼容。
2硬件電路與SPI接口技術
圖2是本文系統節點進行CAN通信的硬件電路圖,在原理圖中,總線控制器MCP2510與總線收發器MCP2551直接相連,因為它們的管腳是完全兼容的,另外,考慮到系統總線速率比較低,所以使MCP2551的斜率電阻輸入引腳RS懸空,選擇最小斜率,這樣,既可將RFI抑制到最小,又可簡化線路設計。下面重點說明一下MCP2510與AT89C51的接口技術。
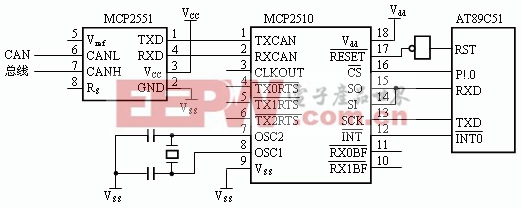
圖2節點進行CAN通信的硬件接口電路
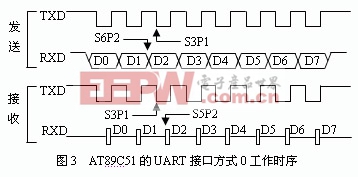
MCP2510面向單片機有1個高速SPI接口(5Mhz),該接口由片選控制輸入CS、移位脈沖輸入SCK、串行數據輸入SI和輸出SO等4個引腳組成。AT89C51不具備標準的SPI接口,但是,可以利用UART接口與SPI接口通信。圖3為AT89C51的UART接口工作在方式0,即移位寄存器方式時的工作時序圖。AT89C51的UART有4種工作方式,按方式0工作時,串行數據從RXD輸入或輸出,TXD輸出移位脈沖,每次發送或接收8位數據,波特率固定為時鐘頻率的1/12,即1個位周期對應1個機器周期,1個機器周期由12個時鐘周期組成,等分為6個狀態(S1~S6),每個狀態又等分為2個相位P1、P2,因此1個機器周期的12個時鐘周期可記為S1P1、S1P2、S2P1、……、S6P2。TXD輸出的移位脈沖在每個機器周期的S3、S4和S5期間為低電平,而在其余時間為高電平。發送時,每個機器周期的S6P2輸出數據,數據有效時間完全覆蓋了TXD輸出脈沖的負半周,顯然,無論是在TXD的上升沿,還是下降沿,外設都可從RXD輸入有效數據。接收時,每個機器周期的S5P2輸入數據,顯然,外設如果在TXD的下降沿輸出數據,單片機就可接收到有效數據。因為MCP2510的SPI接口是在SCK的上升沿輸入數據,在SCK的下降沿輸出數據,所以,在電路圖中,可以將TXD直接作為SCK的輸入信號。MCP2510的SPI接口在讀過程中,首先接收單片機發出的讀命令和地址,這時,輸出信號線SO處于高祖態,之后,在輸出數據時,輸入信號線SI的狀態可為任意值。而在寫過程中,SO始終處于高阻態。一個寫過程或讀過程的啟動或結束,都是由片選信號CS控制的。根據SPI接口的這一工作機理,在電路圖中,將MCP2510的SI和SO連接在一起,形成一個雙向信號線,再與AT89C51的準雙向數據線RXD連接在一起,實驗結果證明,MCP2510與AT89C51的這種連接方式是完全正確的。因為在單片機應用領域,51系列單片機一直是主流產品,所以將其應用于CAN總線系統,無疑可以降低成本,縮短開發周期。
為了實現與MCP2510的SPI接口交互,單片機的UART接口選擇方式0,采用12MHz晶振作為單片機的時鐘頻率,在方式0下,波特率固定為1Mbps。在圖2所示的硬件電路的支持下,AT89C51就可按照普通移位寄存器的方式與MCP2510進行數據交互,對MCP2510進行寫操作和讀操作的匯編語言子程序從略。值得指出的是,因為SPI傳輸數據的順序是先高位后低位,與UART傳輸數據的順序相反,因此,編寫單片機與MCP2510的接口程序時,對MCP2510的控制字、狀態字以及寄存器地址,要進行二進制到排處理。例如,MCP2510的接收緩沖寄存器RXB0的首地址是01010110B,單片機讀其中的內容時,寫入單片機的串口緩沖寄存器SBUF的地址值應該是01101010B。











評論