基于80C196KC的CAN總線智能數據采集模塊設計

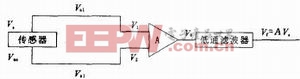
圖3
設Vs為傳感器的信號電壓,Vn1、Vn2為外部噪聲源在電纜線上的感應噪聲信號,Vns為電路噪聲。因此,差分放大器輸出電壓Vo為:
Vo=A(V1-V2)=A(Vs+Vns+(Vn1+Vn2));如果噪聲源與信號源頻譜不重疊,則經低通濾波電路后:Vf≈AVs。
GAL譯碼電路
本模塊電路中,單片機擴展外圍器件較多,有程序存儲器AT28C256、CAN控制器SJA1000、并口擴展82C55A和A/D轉換AD1674。196單片機在模塊中主要工作于8位總線寬度下,由于AD1674采用了12位并行輸出模式,因此還需動態改變總線寬度。為了簡化電路,以及適應196單片機較高總線速度的要求,譯碼電路放棄了傳統的門電路組合的方法,采用了可多次編程的通用陣列邏輯器件(generic array logic)GAL16V8。這樣可以減少元器件數量、降低線路復雜程度,同時降低故障機率及提高硬件設計的靈活性。
GAL16V8引腳分配及邏輯表達式如下:
Input device‘P16V8AS’;
WR,RD,CAN,A12,A13,A14,A15,ADC
pin2,3,4,5,6,7,8,9;
BUSWIDTH,CSCAN,INTCAN,CEROM,CSADC, CS8255,NTADC,EADC
pin19,18,17,16,15,14,13,12;
EQUATIONS
!CEROM=!A15!A14A13!A12#
!A15!A14A13A12
#!A15A14!A13!A12#!A15
A14!A13A12
#!A15A14A13!A12#!A15
A14A13A12
#A15!A14!A13!A12#A15!
A14!A13A12;
!CSCAN=A15!A14A13!A12;
!CS8255=A15!A14A13A12;
!CSADC=A15A14!A13!A12;
BUSWIDTH=A15A14!A13!A12;
!INTCAN=CAN;
!INTADC=ADC;
!CEADC=WRRD;
由上述邏輯表達式可以看出,外圍器件地址基地址由最高4位地址A12~A15決定,AT28C256、SJA1000、82C55A及AD1674對應基地址分別為:2000H,A000H,B000H,C000H。當選通AD1674時,單片機總線寬度控制引腳BUSWIDTH將置為高,動態調整到16位總線寬度,其余時刻,BUSWIDTH為低,單片機保持8位總線寬度。INTCAN和INTADC分別是對SJA1000和AD1674中斷請求信號取反。GAL表達式文件用ABEL軟件編譯形成JED文件,使用通用編程器燒入芯片,且可反復多次燒寫,方便調試。
軟件編程
控制軟件的合理設計是模塊實時、有效地完成數據采集及通信任務的關鍵,主要包括系統初始化、CAN信息處理、數據采集及處理等功能模塊。系統開放一個定時中斷,定時時間對應上位機發送來的采樣周期。CAN報文的接收主要有2種方式:中斷和查詢方式。為提高系統的實時性,同時也保證接收緩沖器不出現數據溢出現象,模塊中采用中斷接收方式。CAN報文發送采用查詢方式,即當需要發送數據時,將預先組織好的數據幀按字節寫入SJA1000的發送緩沖寄存器中。
SJA1000的初始化主要是在SJA1000的復位模式下設置相應寄存器。在初始化CAN內部寄存器時應注意同一網絡中各模塊的通信速率的設置應一致。下面給出SJA1000工作在BasicCAN模式下的簡單的初始化源程序:
INIT-SJA1000:
LDB AL, #01H
STB AL, REG-CR ;復位SJA1000
LDB AL, #0AAH
STB AL, REG-OCR ;設置輸出寄存器為普通輸出模式
LDB AL, #048H
STB AL, REG-CDR ;使能內部比較器,禁止時鐘輸出
STB #01H, REG-BTR0 ;設置波特率為
250K(使用16M晶振)
STB #1CH, REG-BTR1
LDB AL, #00H
STB AL, REG-ACR ;設置驗收碼寄存器
LDB AL, #0FFH
STB AL, REG-AMR ;設置驗收屏蔽碼寄存器
LDB AL, REG-CR
ANDB AL, #0FEH ;SJA1000退出復位模式
LDB AL, #02H
STB AL, REG-CR ;設置中斷寄存器,使能
接收中斷
RET
以上程序段可以正確初始化SJA1000,為了提高程序可靠性和容錯性,實際應用中應該讀出SJA1000寄存器內容并加以比較,從而判斷是否正確寫入。
結束語
基于以上所述的軟、硬件設計實現了CAN協議所包括數據鏈路層和物理層,由于CAN總線協議沒有定義應用層,因此在實際的應用中有必要定義高層通信協議,即相應的命令、參數和數據的格式。國際上比較流行的基于CAN底層協議的高層協議有DeviceNet和CANopen,我們在簡單應用中,采用了自定義的簡單通信協議,在此不作敘述。設計的智能數據采集模塊應用于電液伺服控制系統以來,運行情況良好,由于CAN總線的應用,大大提高了分布式數據采集和控制系統的靈活性、可靠性和實時性,建立了一個有效的現場總線控制系統的實驗教學平臺。同時該數據采集模塊也可以方便地移植到工業上的其它控制系統中,與其它基于CAN總線的智能控制模塊組成CAN現場總線控制系統。












評論