基于LPC2292的CAN總線智能節點設計

CAN總線控制器的初始化過程主要包括相應的引腳功能設置、工作方式設置、波特率參數設置以及出錯警告界限設置等,下面是對CAN1的初始化代碼(CAN2與之類似):
上面所述是對CAN控制器初始化的主要步驟,另外,還可以根據具體情況對其它CAN寄存器的值進行設置。
LPC2292中有個全局驗收濾波器,該模塊可為所有CAN控制器提供接收標識符的查詢功能(即驗收濾波)。另外,驗收濾波器還可為選擇的標準標識符提供fullCAN-style自動接收功能。在上面對CAN控制器的初始化中,為了簡化程序,設計時將驗收濾波器設置為旁路。但在實際應用中,應根據需要對它進行設置。事實上,讓它參與接收濾波的工作有助于改善節點接收信息的選擇性。CAN控制器初始化完成后,即可開始發送和接收信息。
3.3 發送過程
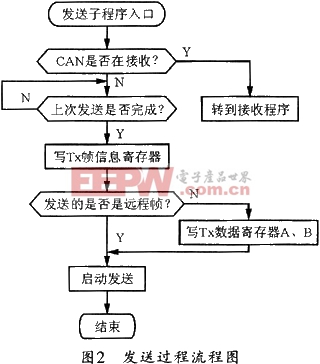
發送子程序主要負責節點報文的發送。發送時,用戶只需要將待發送的數據按特定的格式組合成一幀報文送入CAN控制器的發送緩存區,然后啟動發送即可。當然,在向發送緩沖區送報文之前,必須先做一些判斷。發送程序分為發送遠程幀和數據幀兩種,其中遠程幀無數據場。圖2是發送過程流程圖。
3.4 接收過程
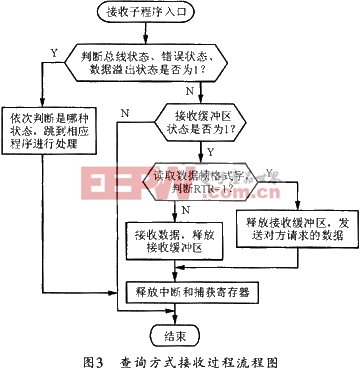
接收子程序主要負責節點報文的接收以及其它情況的處理。接收子程序相對要復雜一些。因為在處理接收報文的過程中,同時也要對總線關閉、錯誤報警、接收溢出等情況進行處理。CAN控制器報文的接收主要有兩種方式:中斷接收方式和查詢接收方式。如果對通信的實時性要求不是很強,建議采用查詢接收方式。兩種接收方式的編程思想基本相同。圖3給出了用查詢方式接收報文的流程圖。
4 結束語
該智能節點可利用EasyJTAG仿真器進行調試仿真,并可在實驗環境下完成通訊功能。該方法與51系列單片機相比,其通信速度較高。因此,在此基礎上構建CAN控制系統具有實際意義,但對于不同系統,其軟件和硬件需要作相應的改動。











評論