基于模糊控制的客車烘房溫控儀

3.2 模糊推理
根據(jù)操作者手動控制經(jīng)驗,本機(jī)采用以下形式制定規(guī)則,形如:“if A and B then C”。可得出20條模糊語句構(gòu)成的控制規(guī)則。本系統(tǒng)采用了最大最小推理法,運算流程為:對應(yīng)某個控制規(guī)則,分析條件時,把當(dāng)前規(guī)則中的,e和ec兩個隸屬度值的大小進(jìn)行比較,取小值。取小之后的值存放到名為“val”的變量中。條件檢測結(jié)束后,開始估計結(jié)果,模糊控制函數(shù)通過比較“val”和當(dāng)前輸出的參考輸出值來得出結(jié)果,取大值,作為的輸出值。一旦結(jié)果分析完畢,開始一個新的規(guī)則查詢。通過遍歷規(guī)則基數(shù)組進(jìn)行估計,當(dāng)遍歷完所有規(guī)則后相應(yīng)的輸出被保存在相應(yīng)的數(shù)組中,用來解模糊。
3.3 逆模糊化
對于單片機(jī)系統(tǒng),考慮簡化逆模糊處理的數(shù)學(xué)過程,解模糊化采用了重心法。溫度輸出控制為U,劃分為5個變量等級(PB,PS,O,NS,NB),輸出U隸屬度函數(shù)采用單點法表示,每個輸出隸屬度函數(shù)用一個字節(jié)的單點值,存放在AT93C66中,以此作為參數(shù),調(diào)整系統(tǒng)的輸出。
3.4 模糊與積分混合控制
由于以上基本模糊控制器只考慮對象的輸出誤差和誤差變化率,相當(dāng)于非線性PD調(diào)節(jié)器,加上其自身的多級繼電器特性,所以它在本質(zhì)上無法消除穩(wěn)態(tài)余差,且易產(chǎn)生極限環(huán)振蕩。本系統(tǒng)加入了積分環(huán)節(jié)。
考慮本系統(tǒng)控制參數(shù)變化范圍不大,可采用雙模態(tài)分段控制算法進(jìn)行控制,即當(dāng)偏差大于某個閾值時用模糊控制,以提高系統(tǒng)阻尼性能,減小響應(yīng)超調(diào)。偏差在小于某閾值時,引入積分環(huán)節(jié)。一般應(yīng)在系統(tǒng)進(jìn)入“穩(wěn)態(tài)”后加入積分器。
積分環(huán)節(jié)的引入,不僅要考慮引入的結(jié)構(gòu)方式,還應(yīng)該考慮引入的時機(jī),因為常規(guī)積分控制作用有一個很大的缺點,就是積分作用的滯后效應(yīng)。在偏差向著減小方向變化時,引入積分,對系統(tǒng)的動態(tài)品質(zhì)不利,容易產(chǎn)生小范圍的持續(xù)振蕩和積分飽和現(xiàn)象,這些實質(zhì)上都是由于加入的時機(jī)不恰當(dāng)造成的。針對常規(guī)積分控制作用的上述缺陷及產(chǎn)生的根本原因,應(yīng)在系統(tǒng)進(jìn)入“穩(wěn)態(tài)”后加入積分器,可以根據(jù)偏差及偏差變化趨勢來改變積分器的作用,僅當(dāng)在偏差向著增大方向變化時,積分起作用,抑制偏差繼續(xù)增大,并可改善穩(wěn)定性能。模糊積分引入方式見圖3,是由一常規(guī)積分器與二維模糊控制器相關(guān)聯(lián)構(gòu)成。本文引用地址:http://www.104case.com/article/163390.htm
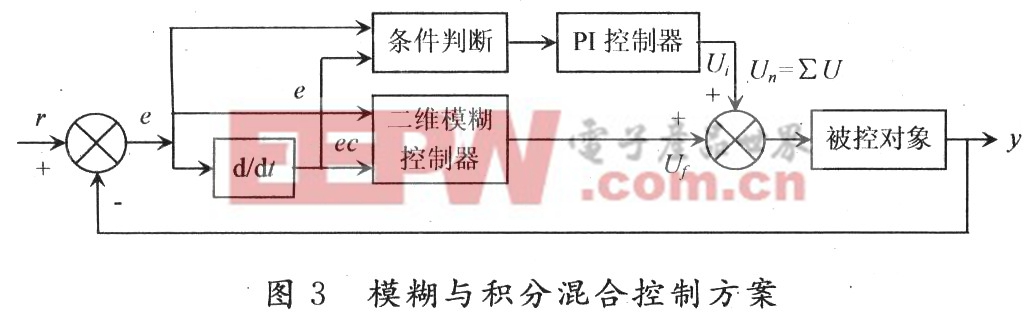
常規(guī)積分控制器輸出Ui=KI∑ei和二維模糊控制器輸出Uf相疊加,作為其總輸出,即:Un=Ui+Uf,因引入了積分環(huán)節(jié),本控制器可消除穩(wěn)態(tài)誤差,消除極限環(huán)震蕩。
4 結(jié) 語
本溫度控制系統(tǒng)結(jié)構(gòu)簡單,使用的主要芯片為AT89C55WD,ICL7135,AT93C66,CD4512。軟件實現(xiàn)容易、編程量小、控制精度高、性能穩(wěn)定。由于采用在系統(tǒng)可編程技術(shù)的單片機(jī),該系統(tǒng)可在正常工作下進(jìn)行調(diào)試,只需設(shè)定不同的參數(shù),即可應(yīng)用于不同的工作環(huán)境。該溫控儀樣機(jī)在揚州亞星客車烘房做了試驗,結(jié)果表明可在一定程度上提高產(chǎn)品的涂裝表面質(zhì)量和生產(chǎn)效率。














評論