基于動態(tài)跟蹤的消除系統(tǒng)溫漂和時漂的解決方案

在硬件基礎(chǔ)上,此方案的實時跟蹤是通過軟件方法來實現(xiàn)的,具體方法是首先控制多路模擬開關(guān),依次選通標準電阻R1,R0,則A/D所對應(yīng)的電壓輸出分別為Vout1,Vout0。設(shè)恒流源的電流為I,2個放大器的放大倍數(shù)分別為K1和K2,放大器反相輸入端基準電壓源的電壓為V-。則有:
 本文引用地址:http://www.104case.com/article/163312.htm
本文引用地址:http://www.104case.com/article/163312.htm3 系統(tǒng)工作穩(wěn)定性測試
為了驗證此方案的可行性,在系統(tǒng)連續(xù)運行不關(guān)機的情況下,實際測得了1組數(shù)據(jù),為了防止鉑電阻阻值隨環(huán)境溫度變化對測試結(jié)果的影響,僅驗證調(diào)理電路的好壞,所以用1個150 Ω的可調(diào)電阻代替鉑電阻,在100~150 Ω范圍內(nèi)模擬鉑電阻,由對應(yīng)的1組阻值實測出1組相對應(yīng)的溫度值。在此僅以其中的1路溫度信號來說明,如表1所示。

由表1中的數(shù)據(jù)用最小二乘法求出鉑電阻阻值R與實測溫度值t之間的關(guān)系式。將測量數(shù)據(jù)列表進行處理,如表2所示。
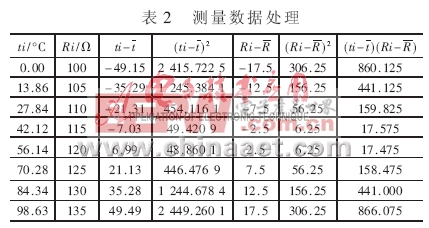
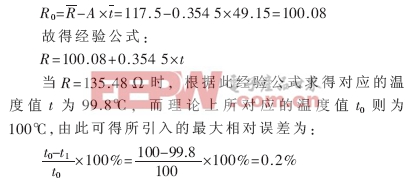
設(shè)R=R0+A×t,應(yīng)用最小二乘法原理求取回歸參數(shù)R0,A,可得:
![]()
由以上分析可知,采用此方案提高了系統(tǒng)工作的穩(wěn)定性和抗干擾能力;同時還提高了元器件之間的互換性,即便是同種型號的元器件的參數(shù)值也并不是完全一致的。而采用這種動態(tài)實時跟蹤元器件參數(shù)值的方法,則有效地解除了元器件之間參數(shù)值不一致的問題[6]。
信號檢測傳感器調(diào)理電路是關(guān)系到整個系統(tǒng)精度的重要環(huán)節(jié),因此,本方案雖然是以犧牲硬件資源的代價來改善系統(tǒng)的抗干擾性能和精度,但考慮到現(xiàn)場干擾極大、環(huán)境惡劣的情況下,與其他方案比較起來,顯然是可取的。







評論