一種紅外單目標跟蹤與防盜報警系統設計

(4)報警電路:完成系統報警。主要由單穩電路HEF4538B脈沖發生電路構成,由比較器輸出的電平作為單穩電路的觸發信號,使電路輸出一個脈沖控制信號用來控制報警電路輸出報警信號,來驅動喇叭進行報警。報警時間可由單穩電路輸出的脈沖控制信號來調節。
(5)攝像機伺服電路:主要包括微處理器及輔助電路、電機驅動電路。根據信號檢測調節電路輸出的信號,通過比較器判斷,目標光斑相對于鏡頭的中心軸的位置,發出對應的控制信號,驅動承載攝像頭的電機進行水平和垂直方向360°的轉動,完成目標跟蹤,并使目標始終處于視場的中心位置。
3 系統軟件設計
系統程序流程如圖7所示。
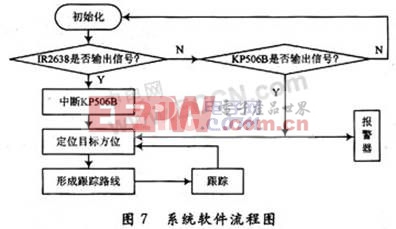
系統上電后,先進行初始化,然后檢測紅外傳感器IR2638的輸出信號,當傳感器有信號輸出,則中斷熱釋電紅外傳感器,表明進入系統檢測區域的是攜帶紅外發射電路的“內部人員”,根據視場定位算法獲得目標當前位置,進而形成攝像頭運動路線,完成主動跟蹤;當紅外接收器IR2638無信號輸出,而熱釋電紅外傳感器KP506B輸出感應信號,則進入系統區域的為“外部人士”,驅動報警器報警同時實現對目標的跟蹤。本系統采用C語言編程,模塊化子程序結構,方便系統的程序接口。
4 系統性能測試
系統上電后,根據單個CCD攝像機視場測量方法,并通過實驗證明,在6 m的范圍內,視場邊界線性一致,隨著物距的增加,視場邊界逐漸縮小,在12 m的地方出現2°的偏差,可近似認為視場邊界線性。在此基礎上分別來實現主動跟蹤、被動跟蹤,并將不同距離情況下跟蹤效果進行比較,結果如圖8和圖9所示。
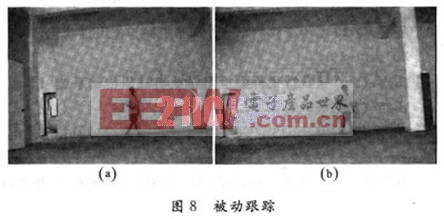
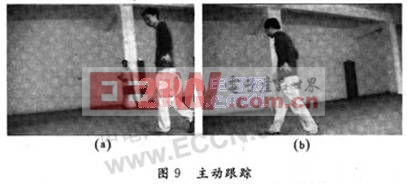
圖8(a)是進入系統視場的未攜帶發射電路的目標,系統實現了對其被動跟蹤。圖9是當攜帶發射電路的“已知目標”和“未知目標”同時進入系統視場,則系統只跟蹤“已知目標”。同時,由圖8和圖9對照得出,在距離不同情況下,跟蹤效果差異性較小,系統性能穩定。
5 結語
本文詳細介紹了一種紅外單目標跟蹤與防盜報警系統原理及功能,并對各模塊給出了設計方案,尤其是選用熱釋電紅外傳感器作為對外來人員的防盜報警,不僅成本低、結構簡單,而且誤報率低。經過多次測試,該系統工作情況穩定,適合在保密性高的高層建筑里作為安防設施。同時系統在紅外傳感領域中有廣泛的應用前景,可以在此基礎上實現多目標的識別跟蹤.



評論