雙軸微機械陀螺儀的移動機器人運動檢測系統

3 實驗分析
3.1 數據來源
實驗條件:陀螺儀測試系統一套(包括360個脈沖/圈的編碼器、IDG-300軟硬件系統),使用Matlab仿真平臺。測試系統可以在±50°擺動運動,陀螺儀的偏轉角度通過編碼器輸出,精度為1°。
3.2 陀螺儀數據處理
所有數據通過測試系統實驗獲得。篇幅有限,下面給出X軸輸出數據采用改進自適應UKF算法后的濾波效果,如圖4~圖6所示。從圖中可以看出,該方法明顯縮成了數據波動范圍。本文引用地址:http://www.104case.com/article/162594.htm

3.3 CAN總線數據傳輸
對CAN總線數據傳輸穩定性做了相應實驗。取數量相同的數據,分別通過總線和串口進行傳輸,信號線長度都是2 m,分別進行相同數據量的1 h和24 h數據傳輸實驗。實驗結果如表1所列。
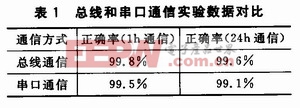
CAN總線通信方式是指在兩個節點間通信;串口通信是指使用ATmegal6芯片的RXD、TXD引腳功能進行數據傳輸。正確率的計算方法為:通信正確率=正確接收數量個數/發送數據總個數。
結語
通過改進自適應UKF濾波算法處理新型雙軸微機械陀螺儀數據,使微機械陀螺儀輸出數據相對穩定,一定程度上降低了微機械陀螺儀隨機漂移。數據傳輸采用CAN總線通信的方式,提高了數據傳輸的正確率與穩定性。
但該系統尚不完善,特別是處理微陀螺儀隨機漂移問題的方法有待進一步改進,以提高微機械陀螺儀的精度,使機器人運動檢測更精確。

評論