電動自行車控制器的技術原理解析

現代電動自行車技術的發展已使控制器遠遠超越了傳統的單一驅動控制功能,成為了電動自行車的能量管理與控制中心,這是保障電動自行車安全行駛、舒適騎行、獲得高動力性能與經濟、節能的核心與關鍵。它對各種工作狀態信息進行采樣、比較與分析并轉換為一系列控制或保護指令,自動監控電機和控制電路使電動自行車得以安全可靠運行。電機的控制系統性能與質量的優劣將決定電動自行車的動力性能、駕駛性能和安全性能。
本文引用地址:http://www.104case.com/article/162560.htm電動自行車控制器的產品日新月異,技術突飛猛進,但電動自行車行業里人們的認知水平參差不齊,為普及電動自行車控制器的知識和提高這一門類科技水平,在這里,我們從基本控制原理到由單片機(MCU)控制構成的智能化系統做相應的介紹。
為了說明原理,我們將電動自行車電機(有刷、無刷)的主控回路等效為簡單的電機控制電路如下圖1-1加以說明:
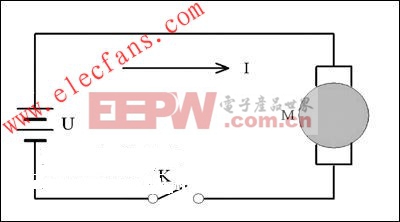
根據電機的工作特性,改變電樞電壓,就能改變電機的轉速,由于電動自行車的電池電壓基本上是固定的,若想實現速度的調節,那么就必須想辦法對施加電機的電樞電壓進行調控變換;同時,電動自行車在使用中遇到堵轉、上坡等實際情況時,它的工作電流會非常大,從等效電路可以看出,雖存在只有0.4Ω左右的內阻,但如果按電源電壓48V計算,其電流值 I=U/R=48V÷0.4Ω=120A,這么大的電流,它的危害可想而知:對電機自身易燒毀繞組,對整車易燒毀主回路導線,同時易造成電池過放電,使電池損毀等致命問題。
如何解決在電池供電條件下實現電機速度的調節?如何對電流進行操控?這是本章引入的主題,也是我們要闡述電動自行車控制系統的基本原理。
我們知道,電機為電感性負載,電感又是個儲能元件,電感線圈在突然斷電時,會產生泵升電壓,即反電勢,那么就可將其看作為可變電壓源。這樣我們就可以將電動自行車所使用的永磁電機主控回路等效為如下圖1-2電路,進行剖析:
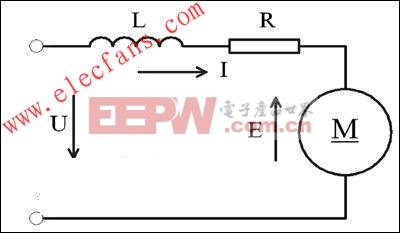
那么,根據以上等效電路,我們就可以找出它的計算方法,如果對電機外施加電壓U,其電壓方程式為:U=E+IR+L公式(1-1)
產生的反電勢為:E=KE公式(1-2)
產生的電磁轉矩為:T=KTI公式(1-3)
式中KE為反電勢常數、KT為轉矩常數,n為電機轉速。










評論