WDM定時器在冗余技術中的應用

0 引 言
本文引用地址:http://www.104case.com/article/162515.htm本文將WDM 的定時器功能應用在冗余技術中,為系統的故障檢測和切換技術提供了一種解決方案, 并以雙冗余CAN 總線接口板為例測試本設計的可行性。
1 冗余技術
冗余技術有兩種方式: 工作冗余和后備冗余。工作冗余是對關鍵設備以雙重或三重的原則來重復配置, 這些設備同時處于工作運行狀態, 工作過程中若某一臺設備出現故障, 它會自動脫離系統, 但并不影響系統的正常工作。后備冗余方式是使一臺設備投入運行, 另一臺冗余設備處于熱備用狀態, 但不投入運行, 在線運行設備一旦出現故障, 后備設備立即投入運行。常用的冗余系統按其結構可分為并聯系統、備用系統和表決系統三種。最簡單的冗余設計是并聯裝置, 其他方法還有串并聯或并串聯混合裝置和多數表決裝置等。當某部分可靠性要求很高, 但目前的技術水平和方法很難滿足時, 冗余技術可能成為惟一較好的設計方法。但是冗余設計往往使系統的體積、重量、費用和復雜度均相應增加。因此, 除了重要的關鍵設備, 對于一般產品不宜采用冗余技術。
冗余配置雖然增加系統的投資, 但它提高了整個用戶系統的平均無故障時間( MTBF) , 縮短了平均故障修復時間( MT TR) 。因此, 在重要場合的控制系統中, 冗余技術的采用可有效提高系統的可靠性。
一個冗余系統要工作通常是硬件與軟件的配合完成的。在硬件上需要有幾個相同的, 可獨立工作的設備。在軟件上來說, 就是在實現系統功能的同時, 要有錯誤檢測功能和動態切換功能, 并且要在盡可能短的時間內完成切換動作。下面以雙CAN 總線接口卡為例,主要從軟件方面詳述本后備冗余設計的實現細節。
2 硬件設計
CAN 控制器采用Philips 的SJA1000, 工作于BasicCAN 模式或PeliCAN 模式下, PeliCAN 模式支持CAN 2. 0B 協議, 采用8 位地址/ 數據復用總線接口。
如圖1 所示, PCI 總線雙CAN 接口卡由2 片SJA1000 提供兩路獨立的CAN 接口, 每片芯片的8 位地址/ 數據總線和讀寫控制信號、鎖存信號直接與PCI9052 相連。SJA1000 輸出信號經過光耦到CAN 收發器PCA82C250, PCA82C250 供電電源為隔離電源,由隔離電源轉換模塊提供。CAN 總線的復位信號由FPGA 提供, CAN 控制器SJA1000 的中斷信號輸出到FPGA。
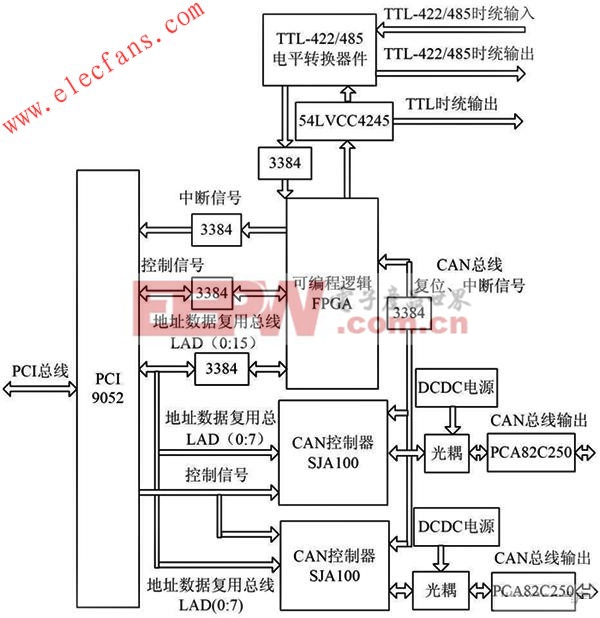
圖1 CAN 冗余模塊系統結構圖。
3 軟件設計
3. 1 WDM 模式驅動程序
在Window s XP 操作系統中, 運行于用戶模式的應用程序訪問硬件資源是通過Win32 API 調用內核模式的驅動程序實現的。這種內核模式的驅動程序就是WDM(Window s Driver Model) 驅動程序, 它是微軟在Window s XP 操作系統中提出的新的驅動程序模式, 支持即插即用、電源管理和I/ O 管理等功能。圖2 是Window s XP 的系統結構。
如圖2 所示設備驅動程序是操作系統的一個組成部分, 它由I/ O 管理器( I/ O Manager ) 管理和調動。
I/ O管理器每收到一個來自用戶應用程序的請求就創建一個I/ O 請求包( IRP) 的數據結構, 并將其作為參數傳遞給驅動程序。驅動程序通過識別IRP 中的物理設備對象( PDO) 來區別是發送給哪一個設備。IRP 結構中存放請求的類型、用戶緩沖區的首地址、用戶請求數據的長度等信息。驅動程序處理完這個請求后, 在該結構中填入處理結果的有關信息, 調用IoCompleteRequest 將其返回給I/ O 管理器, 用戶應用程序的請求隨即返回。訪問硬件時, 驅動程序通過調用硬件抽象層的函數實現。
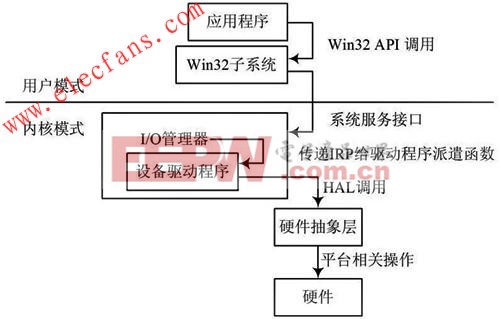
圖2 Windows XP 系統結構。








評論