多通道舵機(jī)控制器設(shè)計(jì)

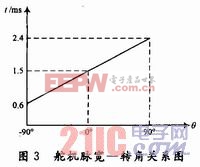
其中脈沖寬度從O.6~2.4 ms,相對(duì)應(yīng)舵盤的位置為-90°~+90°,呈線性變化,如圖3所示。也就是說,給它提供一定的脈寬,它的輸出軸就會(huì)保持在一個(gè)相對(duì)應(yīng)的角度上,無論外界轉(zhuǎn)矩怎樣改變,直到給它提供一個(gè)另外寬度的脈沖信號(hào),它才會(huì)改變輸出角度到新的對(duì)應(yīng)的位置上。
舵機(jī)內(nèi)部有一個(gè)基準(zhǔn)電路,產(chǎn)生周期20 ms,寬度1.5 ms的基準(zhǔn)信號(hào),有一個(gè)比較器,將外加信號(hào)與基準(zhǔn)信號(hào)相比較,判斷出方向和大小,從而產(chǎn)生電機(jī)的轉(zhuǎn)動(dòng)信號(hào)。由此可見,舵機(jī)是一種位置伺服的驅(qū)動(dòng)器,適用于那些需要角度不斷變化并可以保持的驅(qū)動(dòng)當(dāng)中。例如機(jī)器人的關(guān)節(jié)、飛機(jī)的舵面以及無人駕駛汽車的方向盤和油門等。
2 用定時(shí)器實(shí)現(xiàn)多路舵機(jī)PWM控制信號(hào)輸出
對(duì)一個(gè)機(jī)器人關(guān)節(jié)的控制僅需要一個(gè)舵機(jī)就可以了,但在機(jī)器人、無人機(jī)等系統(tǒng)的控制過程中,需要同時(shí)實(shí)現(xiàn)對(duì)多個(gè)舵機(jī)的控制,也就是說,需要多路PWM信號(hào)來完成控制任務(wù)。如圖1所示,單路舵機(jī)信號(hào)在20 ms周期內(nèi),考慮保護(hù)時(shí)隙,t的最大取值為2.5 ms,則20 ms內(nèi)最多可以周期性地輸出8路控制信號(hào)(20/2.5=8)。若使用微處理器的定時(shí)器來實(shí)現(xiàn)的話,每個(gè)定時(shí)器可以控制8路輸出,N個(gè)定時(shí)器則可以輸出8N個(gè)通道。
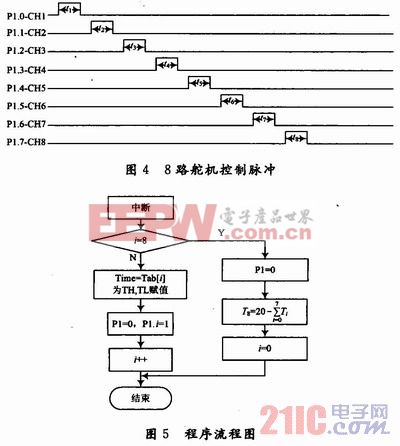
本文所設(shè)計(jì)的舵機(jī)控制器若以MSC-51單片機(jī)為核心,使用12 MHz的晶振,它的時(shí)間周期就是1/12μs,而它的一個(gè)機(jī)器周期則是12×(1/12)=1μs。如果舵機(jī)的有效行程為(°)/10μs,其控制的角度定時(shí)精度是可以達(dá)到1μs,約0.1°,因此,任意類型的單片機(jī)都能夠滿足舵機(jī)的控制精度要求。利用單片機(jī)的串行通信口可以實(shí)現(xiàn)與上位的PC機(jī)的通信,進(jìn)而實(shí)現(xiàn)多路舵機(jī)的同步控制。以AT89C52為例說明該方法的實(shí)現(xiàn)過程,設(shè)單片機(jī)的P1.O~P1.7端口為控制輸出,8路舵機(jī)控制脈沖如圖4所示。
 三相異步電動(dòng)機(jī)相關(guān)文章:三相異步電動(dòng)機(jī)原理
三相異步電動(dòng)機(jī)相關(guān)文章:三相異步電動(dòng)機(jī)原理









評(píng)論