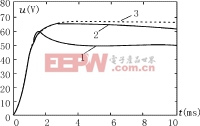
圖2不同控制下起動瞬態過程的比較
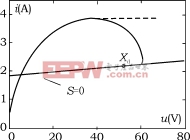
圖3起動過程相平面圖
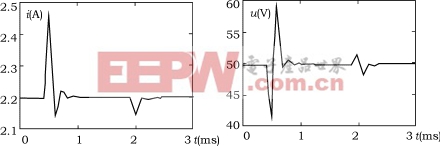
圖4輸入電壓擾動瞬態過程
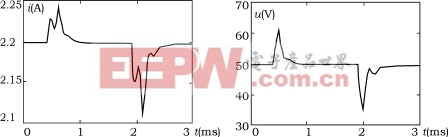
圖5負載擾動瞬態過程
4結論
在實現滑模變結構控制時必須考慮實際控制中的非理想切換條件以及實際控制量的物理約束。本文提出的滑模變結構控制算法簡單,對Boost電路的起動過程和穩態時系統有擾動變化時情況進行仿真,結果表明,本文的控制方案可以減少系統超調,縮短過渡過程時間,改善系統的動態品質,并有效地解決滑模控制中的高頻抖動問題;穩態時,即使系統輸入電壓或者輸出負載有較大擾動,仍然可以保證系統的穩定,控制系統具有較好的魯棒性。
DIY機械鍵盤相關社區:機械鍵盤DIY








評論