如何解決FlexRay時鐘同步的同向漂移

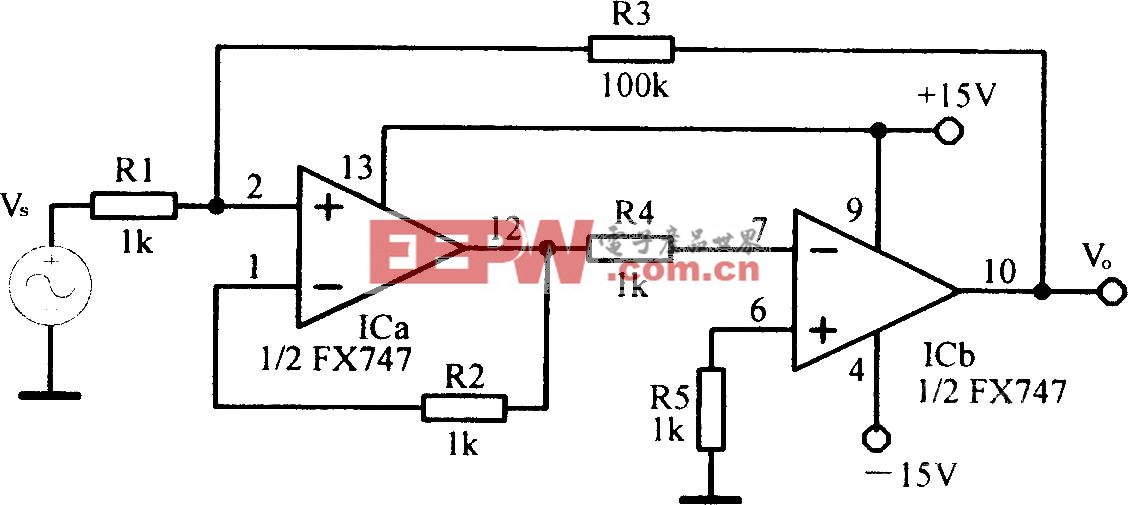
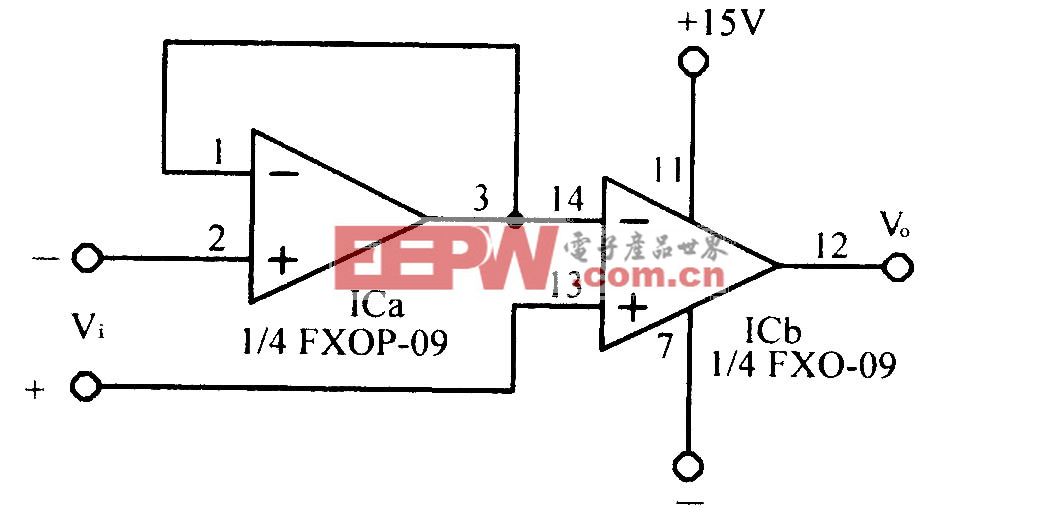
幀的gdActionPointOffset是全局參數,但是由于TSS截短的影響,同步幀接收節點見到的TSS的1/0跳變沿的時間與接收節點ActionPointOffset時間之差并不是節點的時鐘差,所以它用第一個BSS中的1/0跳變沿來倒推發送節點ActionPointOffset,如圖1所示。倒推是該時刻減去常數pDecodingCorrection和pDelayCompensation得到發送節點TSS的開始時刻。PDecodingCorrection內含有TSS、FSS、BSS、總線濾波延遲和位采樣延遲各項。pDelayCompensation內含有收發器延遲、星型耦合器延遲和電纜長度的傳輸延遲。pDelayCompensation的數值取簇中的最小者。由此倒推出的發送節點的動作點稱為primaryTRP,發送和接收的節的動作點的時間偏差就被記錄下來。
接收節點對每一個同步幀都加記錄,該同步幀接收是否正確也記錄在案。只有接收正確的偏差才能用于校正計算之中。
FlexRay有相位與頻率的校正,為了頻率校正,需要連續2個cycle的同一同步節點所發的幀的偏差,所以校正是以2個cycle為周期進行的。頻率校正的計算結果在每個奇數cycle內完成,下一個cycle開始生效,在MT形成過程中實行,因此是均勻分布的。相位校正在奇數cycle的末尾完成,在該cycle的網絡空閑段實行。
4 FlexRay算法的問題

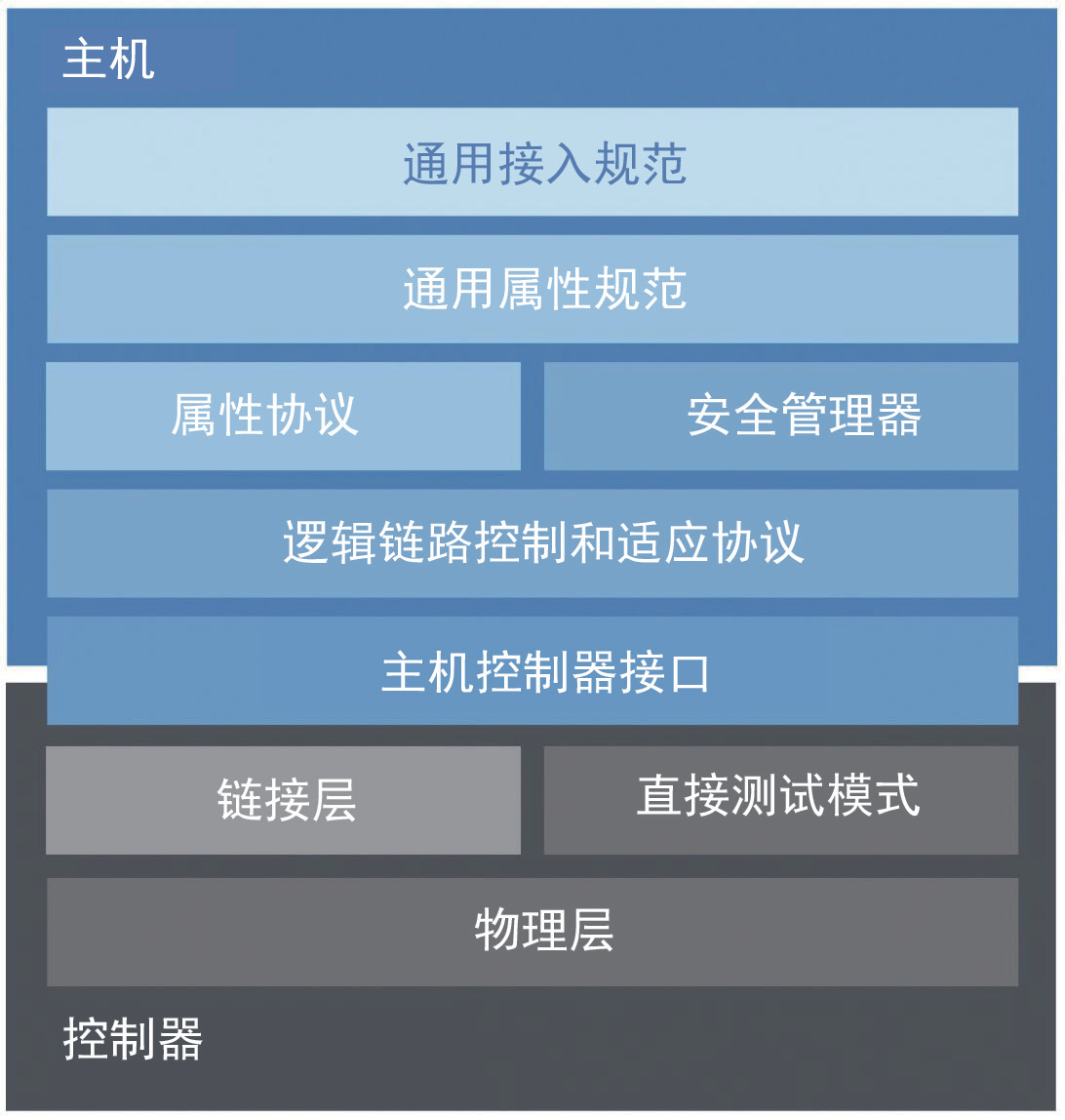
圖2 同步節點位置分布舉例
時鐘偏差推算是造成飄移的原因。圖2中有4個同步幀發送節點1~4,各相距8 m,節點5是普通非同步幀發送節點。按規定,pDelayCompensation是一個預定的常數,該按最小值選取,對圖2的情況,就是節點5和節點2間的延遲,即接近為0。這樣,對實際發生的延遲是補償不足的。不足部分可寫為:

節點間的延遲,按每米10 ns計,最大距離為24 m,那么此補償不足量有0.24 μs。
在圖1中,假定同步幀在cycle的第一個static slot,對static slot的開始時間有一個標準的參考點,發送節點和接收節點各有相位差TT(0)和TR(0),此時接收節點得到的偏差將含有延遲補償不足的部分:

由于距離不同,接收節點得到的URT也是不同的。




評論