異步電動機控制系統開發平臺設計研究

(3)CPLD模塊。
CPLD在該開發平臺中起邏輯控制作用。可以進行:1)QEP信號處理,輸入為速度位置傳感器提供的速度位置信號、DSP給出PWM脈寬調制信號,輸出為各IGBT驅動模塊的控制信號,經光耦隔離電路進入IPM。正交編碼器檢測到的電動機位置轉速信號送至DSP,經過其內部QEP電路得到電動機的速度和方向,實現系統的反饋控制和PWM控制信號輸出,從而達到轉速閉環控制。2)地址譯碼,對DSP輸出的地址信號進行地址譯碼,實現對F2812外圍擴展芯片片選功能,選通相應的外圍芯片映射至F2812內存中。3)DSP的I/O擴展,如果系統同時控制多臺電機,DSP自身I/O引腳就不能滿足要求,需要通過CPLD擴展。CPLD對另外電機的正交編碼信號進行處理,完成正交信號的倍頻、脈沖計數,同時輸出計
數結果,作為電機速度、位置判斷依據。
(4)顯示模塊。
為了保障系統的可靠運行,通過DSP與CPLD的配合,設計了與LCD液晶顯示接口電路,控制LCD顯示以及LED指示燈的顯示,實現了系統的人機接口,使得系統具有良好的人機操作界面。液晶模塊選用長沙太陽人電子有限公司的SMG12864ZK標準中文字符及圖形點陣型液晶顯示模塊,可顯示128×64點陣或8個×4行漢字,DSP與LCD之間的接口電路如圖3所示。本文引用地址:http://www.104case.com/article/162164.htm
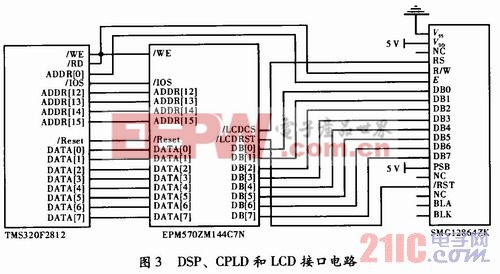
液晶的復位信號/RST和片選信號RS由DSP控制信號經過CPLD譯碼后產生,數據線.DB[0]~DB[7]由TMS320F2812的數據線DATA[0]~DATA[7]經過CPLD的雙向總線驅動得到,其它同名信號對應相連。
(5)保護模塊。
保護模塊主要是在系統上電/掉電或出現故障的情況下,及時提供封鎖信號,保證系統安全可靠地工作。該開發平臺保護電路具有母線過壓保護、過流保護、電機過熱、IPM故障信號處理功能。系統的保護信號也可以融入到CPLD邏輯中,當故障發生時,可以實時快速切斷CPLD的PWM輸出。
同時,為了使該硬件系統應用范圍得到擴展,設計了除異步電動機外不同電機以及不同控制策略可能用到的信號采集電路,以及不同位置反饋器件所用到的接口電路。
2 開發平臺軟件件總體設計方案
開發平臺的軟件開發和調試在TI公司DSP集成開發環境CCSC2000下進行。用C語言進行整個控制系統的軟件編程。模塊化的設計方法,使得編程和使用都方便靈活。利用本控制系統開發平臺,通過軟件編程,可以方便地實現異步電動機矢量控制,直接轉矩控制等控制算法。
CPLD的開發工具為Max PlusII軟件,VHDL語言編程,根據指定的引腳配置自動生成熔絲文件后,對CPLD器件下載編程。程序內各模塊按嚴格時序工作,同時各模塊又并行工作,完成不同的動作。
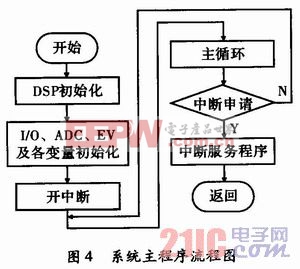
系統控制程序分為兩部分,即主程序和中斷服務子程序。主程序完成初始化后進入循環。中斷服序程序主要完成系統各種控制策略,包括電機定子電流和電壓采樣,完成電流、電壓的A/D轉換。利用正交編碼單元處理速度反饋信號。根據各種控制算法輸出PWM信號對電機轉矩進行控制。系統主程序流程圖如圖4所示。
3 結束語
DSP結合CPLD構建的電機開發平臺,適合異步電動機控制算法的實現,以DSP作為主控制器,CPLD輔助功能擴展,使得整個控制系統開發平臺具有較強的擴展功能和較高的靈活性,不僅節約了成本,縮短了系統開發周期,而且提高了開發性能。













評論