基于雙模糊控制器的水箱液位控制

3 仿真結(jié)果及分析
利用Matlab的Simulink進(jìn)行仿真,建立該系統(tǒng)的雙模糊控制器仿真結(jié)構(gòu)圖如圖3所示,仿真示意圖如圖4所示。本文引用地址:http://www.104case.com/article/162120.htm
仿真結(jié)果如圖5所示。
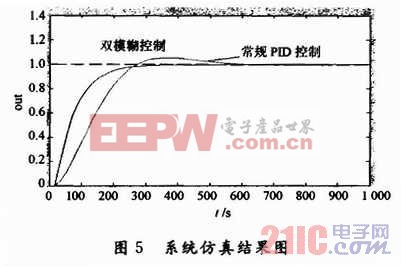
從結(jié)果對(duì)照?qǐng)D來(lái)看系統(tǒng)響應(yīng)時(shí)間的對(duì)比,即:雙模糊控制響應(yīng)時(shí)間短,只需不到300 s即可使系統(tǒng)到達(dá)穩(wěn)態(tài),常規(guī)PID控制響應(yīng)時(shí)間長(zhǎng),大約需要600 s。常規(guī)PID控制存在明顯的超調(diào),雙模糊控制則沒(méi)有超調(diào),雙模糊控制器在穩(wěn)態(tài)時(shí)消除了系統(tǒng)穩(wěn)態(tài)誤差。
4 結(jié)語(yǔ)
本文設(shè)計(jì)實(shí)現(xiàn)了一種雙模糊控制器,利用雙模糊控制器完成了對(duì)系統(tǒng)的仿真。仿真結(jié)果顯示,雙模糊控制器的上升時(shí)間短,響應(yīng)速度快,穩(wěn)態(tài)精度高。從實(shí)驗(yàn)來(lái)看,雙模糊控制器可以改善系統(tǒng)的控制精度和穩(wěn)定性能。若將該理論應(yīng)用于實(shí)際工程,無(wú)疑具有很好的應(yīng)用價(jià)值。












評(píng)論