基于GPRS&GPS的防盜追蹤系統的設計方案

正常情況下, MCU 關斷這2 個模塊的電源, 只間隔一定的時間啟動這兩個模塊報告設備狀況。當傳感器一旦檢測到有異動, 處理器馬上打開這2 個模塊的供電, 使用GPS進行位置定位, GPRS 向用戶發送設備狀況以及報警。
L T3125 是凌力特爾公司的一款DC-DC 電源芯片, 輸入電壓可在1. 8~ 5. 5 V, 輸出在2~ 5 V 可調, 輸出峰值電流1. 2 A, 并帶使能控制開關。此芯片剛好能滿足本系統的要求, 在電池低于3. 6 V, 一直到1. 8 V 也能確保GPRS 能正常工作。
L P3996 是美國國家半導體公司生產的一款帶控制開關的LDO 芯片, 能把3. 6 V 輸入電壓轉成3. 3 V 電壓穩定輸出, 具有低紋波特點, 剛好滿足GPS 模塊低紋波輸入要求。
3. 2 處理器與通信模塊
GPRS 與GPS 模塊都是通過UA RT 接口對外進行通信, 如圖4 所示。GPRS 模塊對外的接口為一個標準的9線U ART 接口, 其電平為2. 8 V, 而處理器的電平為3. 3V, 因此在GPRS 模塊與處理器之間需要有一個電平轉換的buffer , 實現接口的電平匹配。系統采用的是IDT74FCT 3244Q8 作為電平轉換的芯片。GPS 模塊也是通過一個U ART 串行接口與單片機進行通信, 此串行接口使用起來比較簡單, 只有收發2 根線。
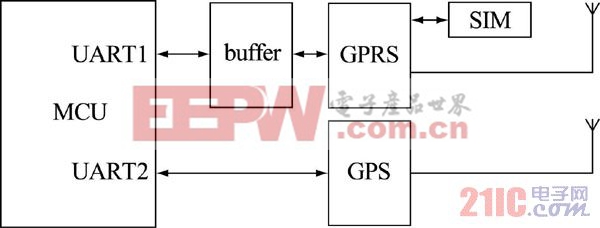
圖4 GPRS、GPS 通信模塊
處理器采用的是ATMEL 公司的A T91SAM7S 系列的A RM7 芯片, 具有3 個U ART , 其中一個為標準的9 線串口, 8 路A D, 內嵌512K 的Flash, 能滿足系統的需求。
GPRS 模塊則采用的是WAV ECOM 公司的Q 24PLUS 型號, 此模塊集成了T CP/ IP 協議棧, 對外的接口為一9 線標準串口, 通過此串口利用AT 指令控制模塊, 能夠實現數據的透明傳輸。支持GSM、GPRS 網絡, 以及4 頻段載波。GPS 模塊采用的是U blox 公司的LEA-5H 型號,支持冷熱雙啟動模式、快速定位, 內含RAM, 在有后備電池的情況下能保存位置信息, 實現快速熱啟動。輸出的信息為國際標準的NMEA 格式的字符串, 對外接口為2 線串行接口, 用戶只需接收NMEA 字符串, 并按格式提取相應信息即可。
3. 3 處理器與傳感器
傳感器采用的是Analog Device 生產的一款三維重力加速度傳感器, 其型號是ADXL335, 此傳感器能精確的實時的測量三維方向上的加速的大小, 并量化成電壓值從3個接口輸出, 用戶只需測量這3 個電壓值的大小, 并通過特定的公式計算, 從而得知3 個方向上的加速度大小。系統采用3 路10 位的AD 對輸出的電壓進行采樣, 從而得到較為精確的電壓值, 并在處理器內部通過一定的算法,把這3 個電壓值換算成加速度值, 從而判斷物體是否發生運動。
4 系統軟件設計
系統的處理器為A RM7 處理器, 并采用ECOS 嵌入式操作系統, 所有的軟件都是基于ECOS 平臺進行開發的。系統的軟件架構如圖5 所示。最底層的是位于硬件層之上的驅動層, 包括GPRS、GPS、傳感器, FLASH 等一些驅動模塊; 再上一層就是操作系統層, 這些模塊都在ECOS 操作系統目錄下而被ECOS 調用; 位于操作系統之上的即為應用層。應用層包含了系統要求的各項功能: 系統初始化、GPS 追蹤定位、運動檢測、用戶命令處理等。

圖5 系統軟件架構
4. 1 追蹤定位過程
一般情況下, 系統處于休眠模式, 并偵聽喚醒信號的到來, 一旦接收到喚醒信號, 開始檢查物體是否被移動, 若沒有移動, 則仍然用以前的位置信息作為現在的位置信息, 一旦檢測到移動, 則馬上啟動GPS 模塊, 實時獲取當前的位置信息, 并覆蓋以前的位置信息, GPRS 再把新獲取的位置信息報告給上位機, 實現位置的實時跟蹤。











評論