光導智能小車設計


當左邊光電池輸出電壓大于右邊光電池輸出電壓,表明光源處于小車左側,小車左轉。
當右邊光電池輸出電壓大于左邊光電池輸出電壓,表明光源處于小車右側,小車右轉。
當右邊光電池輸出電壓等于左邊光電池輸出電壓,表明光源處于小車正前方,小車直線前進。
光導智能小車硬件電路
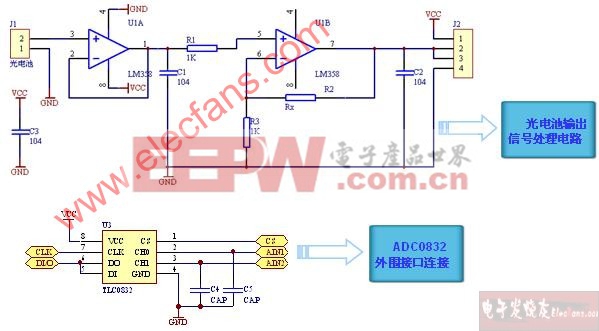
硬件電路原理分析
串行A/D轉換器接口電路
模擬電壓輸入接口
CH模擬電壓輸入端口0
CH1:模擬電壓輸入端口1
串行接口
CS:片選信號
CLK:時鐘信號
DI:數據輸入端口
D數據輸出端口
光電池輸出信號處理電路
U1A構成一級跟隨器,實現阻抗變換,消除后級電路對光電池的影響;
U1B構成一級同向放大電路,并利用RX實現增益調節,改變電路的靈敏度。







評論