基于MCL算法的無線傳感網絡節點定位技術

1.2 位置預測
在MCL算法位置預測階段,節點從前一階段計算出的一組可能位置Lt-1開始,對每個采樣值應用節點移動模型從而獲得一組新的采樣值Lt。假設節點的移動速度和方向未知,而只知道其速度值小于Vmax那么,如果lit-1是節點的一個可能位置,那么節點所在的當前可能位置則位于以lit-1為圓心、半徑為Vmax的圓形區域內。如果用d(l1,l2)表示兩點l1和l2之間的歐幾里德幾何距離.而且節點的移動速度在區間[0,Vmax]上服從均勻分布,那么節點基于先前位置的當前位置估計的概率分布可以通過以下均勻分布的形式給出。

因此,在預測階段計算出的節點可能位置序列R就是以點集Lt-1中的任意一點為圓心且半徑為Vmax的圓形區域。
1.3 位置濾波
在濾波階段,節點需要根據所獲得的新觀測值濾除不可能的位置信息。為了便于描述和分析,假設在t時刻每個位于信標節點無線射程范圍內的節點都可以偵聽到來自信標節點的位置信息廣播。在實際的網絡部署情況下,需要考慮網絡沖突并解決消息丟失的問題。
如圖1,節點在t0時刻由位置l0開始移動,并在t1時刻到達位置l1,節點離開區域I并到達區域Ⅱ,但始終在區域Ⅲ內。到達節點和離開節點都為節點的位置估計提供信息,節點知道在t0時刻位于以如為圓心且半徑為r的圓形區域內的信標節點,在t1時刻并不在l1為圓心且半徑為r的圓形區域內。
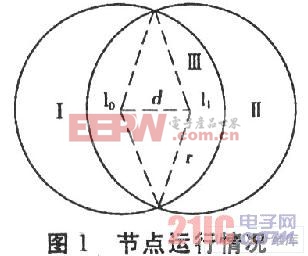
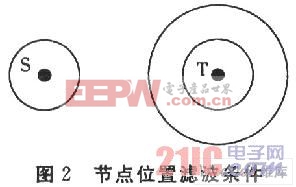
圖2描述了節點的位置濾波條件。圖中。S表示節點N能偵聽到的所有信標節點分組。T表示節點N的鄰居節點可以偵聽到而節點N本身無法偵聽到的全部信標節點。因此,節點位置l的濾波條件可以由式(2)表示。

如果濾波條件為假,那么節點位置的概率分布p(lt|Ot)值為零,否則p(lt Ot)將符合均勻分布,這樣.就可以從節點的所有可能位置集合中去除那些與觀測值不一致的位置。經濾波后,節點剩余的可能位置也許會少于N個。預測過程和濾波過程將不斷重復進行,并結合已經發現的節點可能位置,直至獲得節點的至少N個可能位置。
1.4 重要性采樣
算法的最終目標是估計節點可能位置的后驗概率分布p(lt|O0,O1,…Ot)。首先,通過一個標準化重要性采樣函數π獲得一系列相互獨立的節點位置采樣值;然后,對每個采樣值的權重值進行調整并且使用這些權重值對節點所在可能位置的后驗概率分布作出估計。算法采用了下列遞歸式重要性函數。

式(3)表示節點的位置預測,節點借助先前所在的可能位置預測其當前的可能位置。式(4)表示節點的位置更新,節點根據獲得的觀測值對新的采樣值不斷進行權重值更新與調整。然后。通過式(5)對權重值Wit;進行歸一化處理得到Wit用權重值序列(lit,wit)對節點位置的后驗概率分布作出估計。通過式(3)和式(4)的反復計算,很容易地確定概率值p(lk|lk-1)和p(l1|Ot)的大小。







評論