基于LPC2129定時器捕獲功能的車速信號采集系統

1.3 計算方法
常用的速度計算方法有3種:頻率法、周期法、多倍周期法。頻率法是通過測量給定時間內的輪速脈沖信號個數來計算輪速,周期法通過測量被測脈沖寬度來計算車速。本文所采用的速度采集算法類似于周期法。設置一個時間閘門Ts,通過PWM來實現。CAP的第一個通道在時間Ts內可以記下每次中斷的當前時間,并放在寄存器CAP_DATA中。記錄下來的值是內部定時器1的當前值,當晶振頻率為11.059 2 MHz時,定時器1的內容每90 ns增1個。用最后一次中斷的實時時間減去第一次中斷的實時時間即為實際的采樣時間Td。
采用周期法計算車速N的公式:
式中:N的單位為r/rain,n為采樣時間內獲得的脈沖總數,Td為實際采樣時間,單位為ms。
本文采用的車速計算公式:
式中:V的單位為km/h,i為主減速比3.6,CR為車輪每轉一圈所走過的距離,單位為km/h。
2 軟件設計
車速傳感器的工作原理是把變速器蝸桿旋轉轉變為脈沖信號,每旋轉一周產生4次脈沖信號。為了檢測脈沖信號,同時也能對脈沖信號進行計算,可采用查詢法或中斷法。查詢法即通過查詢,確認定時器已記錄有效事件后再行讀取。中斷法即利用程序控制的方法,在FIFO溢出或保持寄存器已加載時產生中斷,在服務程序中讀取定時器中已記錄的信息并進行處理,以得到車速并輸出到顯示器。
本系統采用的是中斷法,輸入引腳的事件方式采用正負跳變在不同通道采集。由于篇幅有限,只給出車速信號采集代碼。

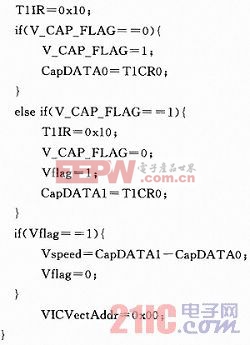







評論