基于Petri網的機車故障診斷方法研究

1 引言
本文引用地址:http://www.104case.com/article/161443.htm目前,對于機車故障檢查與診斷存在各種方法,其中專家系統,故障樹分析方法(fta),以及兩者的結合體是被廣泛接受的方法,然而,他們也存在一些缺陷;fta僅能表示邏輯關系[1],不能表示動態行為;而專家系統突出弱點就是知識獲取的“瓶頸”問題[2];基于故障樹的專家系統診斷系統在一些方面雖得到優化,但是由于故障樹模型之間的缺陷,又加上診斷的規則數目較多,當添加修改規則時,易出現規則之間的沖突和冗余,無法保證專家系統高效、正確地運行。
在故障檢測與診斷領域中,petri網不僅能夠用圖形符號表示故障事件系統邏輯關系,知識的完成和診斷推理,而且能夠表示系統的動態行為,故petri網模型能夠用于機車故障檢測和可靠性的分析。
在此利用petri網的可達性和狀態方程方法,分析故障樹信息,解決故障檢測和故障傳播問題。與基于故障樹的診斷方法相比,本文提出的方法具有結構表達圖形化、 推理搜索的快速化以及診斷過程的數學化等優點。
2 petri網理論基礎及分析
2.1 petri網結構和分析方法
從圖形上看,petri網由4種不同類型的元素組成,即庫所(place,用“○”表示)、轉移(transition,用“|”表示)、連接庫所和轉移的有向弧及位于庫所中的托肯(token,用“·”表示)。庫所表示系統狀態的邏輯描述,轉移表示系統中事件或行為產生過程,輸入函數(i)和輸出函數(o)分別描述庫所和轉移之間的聯結函數關系。若一庫所被賦與k個標記(k為非負整數),則說該庫所有k個托肯,也稱該庫所被標記。于是定義標記petri網為一5元組:
∑=(p,t,i,o,m)。以圖1所示petri網為例對上述定義進行具體描述[6]。
∑=(p,t,i,o,m);
p={p1,p2,p3,p4};
m=(1 0 0 0);
i(t1)={p1};o(t1)={p2};
i(t2)={p1};o(t2)={p3};
i(t3)={p2,p3};o(t3)={p4};
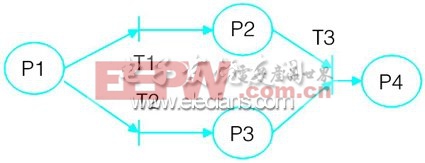
圖1 petri網模型
petri網的執行過程受控于網中托肯的數量和分布情況,并通過轉移的點火得以實現。一個轉移可點火,首先該轉移必須允許點火,即轉移使能。一個轉移使能的前提條件是該轉移的每一個輸入庫所中被標記的托肯數至少等于該所到該轉移的有向弧數。也就是說一個轉移的所有輸入庫所中至少包括一個托肯(假設每條有向弧的權均為1)。體現petri網動態行為的啟動規則是:若庫所代表的條件滿足,轉移就點火,點火后轉移的輸入庫所的托肯數等于原托肯數減去該庫所到轉移的輸出弧數。轉移的點火使petri網的標記由m轉變為m’。
關聯矩陣和狀態方程是petri網分析和建模的主要工具,狀態方程的表示為
m=m0+ct*uo
m,m0分別點火前后的初始標識集和結果標識集;ct為關聯矩陣,u為點火序列,由0,1組成的n×1列矩陣。
1 引言
目前,對于機車故障檢查與診斷存在各種方法,其中專家系統,故障樹分析方法(fta),以及兩者的結合體是被廣泛接受的方法,然而,他們也存在一些缺陷;fta僅能表示邏輯關系[1],不能表示動態行為;而專家系統突出弱點就是知識獲取的“瓶頸”問題[2];基于故障樹的專家系統診斷系統在一些方面雖得到優化,但是由于故障樹模型之間的缺陷,又加上診斷的規則數目較多,當添加修改規則時,易出現規則之間的沖突和冗余,無法保證專家系統高效、正確地運行。
在故障檢測與診斷領域中,petri網不僅能夠用圖形符號表示故障事件系統邏輯關系,知識的完成和診斷推理,而且能夠表示系統的動態行為,故petri網模型能夠用于機車故障檢測和可靠性的分析。
自1962年由carl adam petri提出petri網的概念以來,petri網己廣1泛應用于計算機操作系統、通信協議、分布式數據庫系統及任務規劃和性能評價等領域。在此利用petri網的可達性和狀態方程方法,分析故障樹信息,解決故障檢測和故障傳播問題。與基于故障樹的診斷方法相比,本文提出的方法具有結構表達圖形化、 推理搜索的快速化以及診斷過程的數學化等優點。









評論