基于PMC6496運(yùn)動(dòng)控制器的機(jī)械手上下料系統(tǒng)

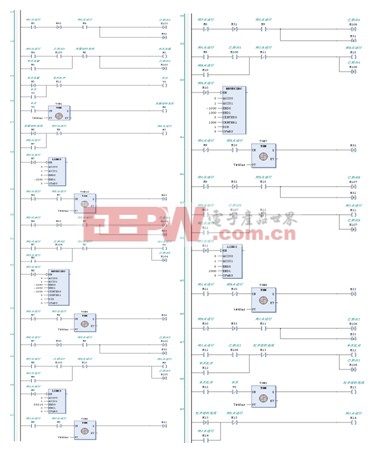
圖6(續(xù)3) 程序23-37節(jié)圖6(續(xù)4) 程序38-49節(jié)
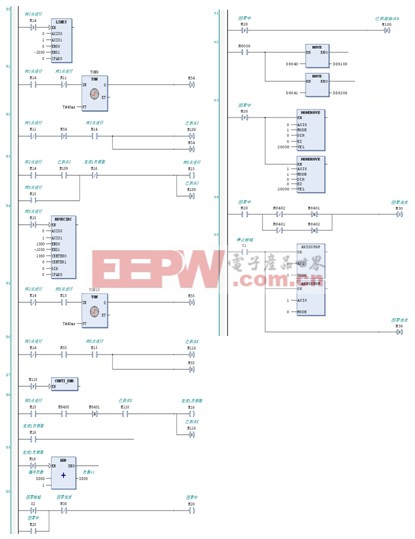
圖6(續(xù)4) 程序50-65節(jié)
程序中所使用的幾個(gè)關(guān)鍵運(yùn)動(dòng)指令功能塊為PMC6496運(yùn)動(dòng)庫(kù)的一部分,解釋如下:
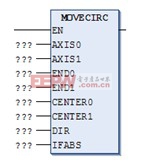
圖7 圓弧插補(bǔ)功能塊
本文引用地址:http://www.104case.com/article/160708.htm
2. MOVECIRC
描述:指定的兩軸以當(dāng)前位置為圓弧起點(diǎn),按已指定的終點(diǎn)位置、圓心位置、插補(bǔ)方向,執(zhí)行圓弧插補(bǔ)運(yùn)動(dòng)。其功能塊如圖7所示。
參數(shù):
EN:BOOL類型,使能端(Enable),指令塊的驅(qū)動(dòng)輸入端。
AXIS0:指定參與圓弧插補(bǔ)的第一軸。
AXIS1:指定參與圓弧插補(bǔ)的第二軸。
END0:指定第一軸的圓弧終點(diǎn)坐標(biāo)。
END1:指定第二軸的圓弧終點(diǎn)坐標(biāo)。
CENTER0:指定第一軸的圓弧圓心坐標(biāo)。
CENTER1:指定第二軸的圓弧圓心坐標(biāo)。
DIR:USINT(BYTE)類型,指定圓弧插補(bǔ)的方向。
IFABS:指定運(yùn)動(dòng)模式,0-相對(duì)運(yùn)動(dòng),1-絕對(duì)運(yùn)動(dòng)。
2. PMOVE
描述:指定軸按已設(shè)定的脈沖長(zhǎng)度及方向、起始速度、最大運(yùn)行速度、加速度、減速度以及運(yùn)動(dòng)模式執(zhí)行點(diǎn)位運(yùn)動(dòng)。其功能塊如圖8所示。
圖8 點(diǎn)位運(yùn)動(dòng)功能塊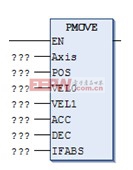
參數(shù):
EN:使能端(Enable),指令塊的驅(qū)動(dòng)輸入端。
Axis:指定軸號(hào),范圍為0~3軸。
POS:指定點(diǎn)位運(yùn)動(dòng)的目標(biāo)位置,即脈沖數(shù),正、負(fù)號(hào)分別表示正方向和負(fù)方向。比如,-10000表示負(fù)方向運(yùn)動(dòng)10000個(gè)脈沖的長(zhǎng)度。
VEL0:指定起始速度(即初速度),單位:脈沖/秒。
VEL1:指定運(yùn)行速度(即最大速度),單位:脈沖/秒。
ACC:指定加速度,單位:脈沖/秒2。
DEC:指定減速度,單位:脈沖/秒2。
IFABS:指定運(yùn)動(dòng)模式,0-相對(duì)運(yùn)動(dòng),1-絕對(duì)運(yùn)動(dòng)。
3.HOMEMOVE
描述:指定軸按已設(shè)定的模式、方向、速度執(zhí)行回原點(diǎn)動(dòng)作。回原點(diǎn)完成后,當(dāng)前坐標(biāo)被清0,即視為原點(diǎn)(或稱零點(diǎn))。其功能塊如圖9所示。
圖9 回原點(diǎn)運(yùn)動(dòng)功能塊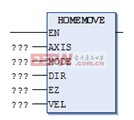
參數(shù):
EN:使能端(Enable),指令塊的驅(qū)動(dòng)輸入端。
Axis:指定軸號(hào),范圍為0~3軸。
DIR:指定回原點(diǎn)方向,1-正向,0-負(fù)向。
MODE:指定回原點(diǎn)模式。
EZ:只對(duì)模式4起作用,即反找原點(diǎn)時(shí),EZ信號(hào)的個(gè)數(shù)。
VEL:指定回原點(diǎn)速度,單位:脈沖/秒。
4.LINE2
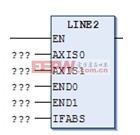
圖10 軸直線插補(bǔ)功能塊
描述:指定的兩軸按已指定的終點(diǎn)位置,及運(yùn)動(dòng)模式執(zhí)行直線插補(bǔ)運(yùn)動(dòng)。其功能塊如圖10所示。
參數(shù):
EN:使能端(Enable),指令塊的驅(qū)動(dòng)輸入端。
Axis0:指定參與插補(bǔ)的第一軸,指定范圍為0~3軸。
Axis1:指定參與插補(bǔ)的第二軸,指定范圍為0~3軸。
END0:指定第一軸的目標(biāo)位置,單位:脈沖數(shù)。
END1:指定第二軸的目標(biāo)位置,單位:脈沖數(shù)
VEL1:指定運(yùn)行速度(即最大速度),單位:脈沖/秒。
IFABS:指定運(yùn)動(dòng)模式,0-相對(duì)運(yùn)動(dòng),1-絕對(duì)運(yùn)動(dòng)。
五 總結(jié)
綜上所述,PMC6496運(yùn)動(dòng)控制器具有運(yùn)動(dòng)控制功能多、處理I/O信號(hào)能力強(qiáng)、性價(jià)比高等優(yōu)點(diǎn);而且采用梯形圖編程十分簡(jiǎn)單、方便,很容易上手;使用PMC6496可以輕而易舉地完成各種自動(dòng)化設(shè)備的復(fù)雜運(yùn)動(dòng)控制。
作者簡(jiǎn)介
趙向前 男,工程師 2009年哈爾濱工業(yè)大學(xué)機(jī)電學(xué)院畢業(yè),從事自動(dòng)化技術(shù)研發(fā)工作。
左 力 男,博士,高級(jí)工程師,1998年華中理工大學(xué)機(jī)械學(xué)院畢業(yè),從事自動(dòng)化技術(shù)研發(fā)工作。

伺服電機(jī)相關(guān)文章:伺服電機(jī)工作原理










評(píng)論