基于CAN總線和單總線的在線式防誤閉鎖系統設計

圖3所示是本文昕設計的防誤閉鎖系統的整體結構圖。其中監控主機是整個系統的核心,在監控主機上運行著防誤系統應用軟件。監控主機能夠采集和記錄整個系統的設備信息,包括系統連接的控制器數、控制器通訊狀態、控制器連接的電磁鎖數以及每把電磁鎖的閉鎖狀態和通訊狀態等,并把這些信息保存到數據庫中以供查詢。另外,主機針對操作票的每一項操作,首先要進行五防邏輯判斷,若操作符合防誤邏輯,則主機發送相應鎖具的解鎖命令,否則對相應的操作予以閉鎖,防止誤操作的發生。
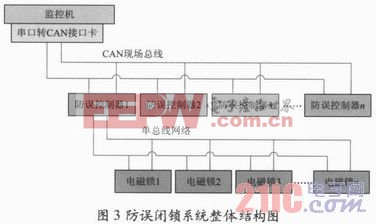
系統中的防誤控制器是聯系主機和電磁鎖的紐帶,控制器的結構包括電源電路、CAN網絡通訊電路、單總線網絡通訊電路、實時鐘電路等幾部分。控制器采用具有強抗干擾能力的工業級單片機設計而成,負責把接收到的主機命令轉發給相應的電磁鎖,以完成解閉鎖相關設備的功能。除了負責將主機的解鎖命令轉發到相應鎖具外,控制器還負責本間隔的單總線網絡的管理。控制器還會定時對單總線執行搜索命令,通過搜索命令可以檢測到單總線連接的設備情況,然后將搜索結果與控制器內保存的設備信息進行比較,就可以發現新連接列單總線網絡的設備,也可以發現已接入設備的通訊異常狀態。智能電磁鎖是防誤閉鎖的具體執行機構。對于手動操作的設備,一般需要在操作把手上安裝電磁鎖。所有的鎖具都采用單總線芯片設計,故能方便地通過一條單總線連成單總線網絡。實際上,整個間隔內的接線非常簡潔。
4 電磁鎖的配置
在已有的在線式設計方案中,對開關和電動刀閘的閉鎖通常通過在其測控屏串入監控五防閉鎖節點和測控五防閉鎖節點來實現。本文主要討論對手動刀閘、接地樁和網門的閉鎖。
對手動刀閘閉鎖時,可在手動刀閘的操作把手上加裝智能電磁鎖。當需要對刀閘進行操作時,由后臺監控機先進行五防邏輯判斷,當滿足操作條件時,向間隔控制器發解鎖信號,由間隔控制器將電磁鎖解鎖,然后才能操作。開鎖后,電磁鎖的狀態置為0。
對于接地樁的閉鎖,由于接地樁是為臨時接地線配置的接地端,可在接地樁上加裝一個接地箱,再配一把電磁鎖。當需要接地時,電磁鎖只有滿足五防邏輯時才能打開,此時電磁鎖的狀態置為1;需要拆除接地線送電時,必須真正拆除接地線后,接地箱才能關閉,關閉后,電磁鎖的狀態置為0。此時后臺監控機才會開放接下來需要操作的電磁鎖,這樣可有效防止帶接地線合斷路器的惡性誤操作的發生。
網門的閉鎖與手動刀閘相同,存此不再贅述。
5 結語
隨著變電站自動化技術的不斷推廣和運行管理模式的進步,防誤閉鎖技術也面臨許多新的要求,在這些需求的推動下,作為主流的微機防誤閉鎖技術也在不斷地改進,新的設計概念不斷出現。本文所做工作是在線式防誤閉鎖系統中電磁鎖與監控系統聯網部分的設計。事實上,本系統還需進一步的完善和改進。另外,在線式防誤閉鎖系統要實現與操作票系統和變電站監控系統的有效結合,還需對操作票系統和變電站監控系統進行研究,只有在熟悉三個系統的基礎上進一步加強結合,實現方案的整體設計目標,才能使在線式防誤閉鎖系統更高效地防止電力系統誤操作事故的發生。










評論