基于dsp的交流調速系統硬件接口電路設計方案

3.4采樣電阻的計算
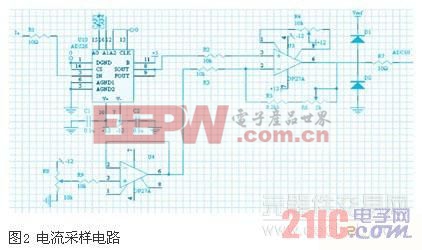
由電流傳感器的變比2000:1,及原邊電流值大小:200a,ad526輸出電壓為1.65v,可以求出采樣電阻r9《16.5ω,故可取r9=10ω。其中,a相電流的采樣電路如圖2所示,b相與其相同。
起動的快速性是電動機的基本要求。以目前無位置傳感器控制技術發展的情況來看,由于低速特別是起動瞬間反電動勢非常低,控制精度和性能并不理想。因此有必要保留位置速度傳感器。
4.1編碼器的選擇
與旋轉變壓器相比,光電編碼器信號處理簡單、噪聲容限大、易于實現高分辨率。特別是在選用tms320f2812作為控制器的情況下,光電編碼器可以通過dsp的qep接口十分方便地實現與控制器的連接。
本設計選用了sumtak株式會社產的lhe-055-2000型帶u、v、w信號增量式光電編碼器。它輸出12路信號:a、b、z、u、v、w以及他們的補信號a’、b’、z’、u’、v’、w’。其中a、b、a’、b’為占空比為50%的方波,2000p/r。u、v、w、u’、v’、w’以轉子每360°電角度為一個循環周期。u、v、w(或u’、v’、w’)相差120°,按照u、v、w(或u’、v’、w’)不同組合,可以把一對轉子磁極分為6個等距區間。所以在電機起動時,可以先根據u、v、w信號按照無刷直流電動機控制,使電機運行起來,待檢測到z信號,按照事先確定好的轉子磁極位置確定定子磁鏈初值,然后轉入直接轉矩控制。通常把z信號定位于a相繞組反電動勢的過零點,此時,轉子磁極軸線正好與a相繞組軸線重合。
其中a、b信號分別通過qep1、qep2接到lf2407a上;而z信號通過cap3接到lf2407a上;u、v、w是以60°電角度為周期的數字信號,分別通過qep1、qep2、qep3接到lf2407a上。
4.2 26c32的使用
由于光電編碼器內部集成了26c31芯片,所以由它引出了a、b、z、u、v、w以及他們的補信號a’、b’、z’、u’、v’、w’以及地線和電源線,但是這些線不能直接接到dsp上,這里就需要用26c32來接接收由26c31引出的所有線路。
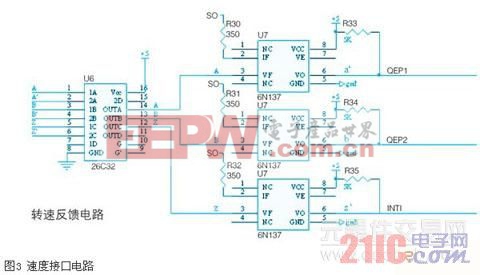
由于26c32可以同時接受四路信號,所以,a、b、z、a’、b’、z’信號可以同時與26c32的ina1、ina2、inb1、inb2、inc1、inc2端相連,輸出端outa、outb、outc端分別接到光耦6n137芯片上輸出再與tms320f2812的qep1、qep2、int1相連,以完成轉速環節的接口電路。
本來光電脈沖編碼器的a、b輸出可以直接接到tms320f2812的qep1、qep2上,但為保護起見,還得加上高速光電隔離。圖3中是a路信號的接口電路,b、z路接口電路與此相同。它主要由ti公司的光耦6n137組成。這里用快速光耦的原因是:碼盤輸出的信號的頻率最高接近60khz,而普通光耦的開通和關斷延時就有幾個微秒,無法滿足要求。在tms320f2812中將捕獲單元配置成正交編碼脈沖模式,在這種模式下,兩個16位通用定時器t1和t2可工作于qep模式的16位或32位雙向計數器。qep電路直接處理光電編碼器輸出的兩路相位相差90°的兩路脈沖,只要將這兩路脈沖分別接到qep1、qep2即可。qep模式對兩路脈沖的前后沿均進行計數,無需外部的倍頻電路。而且它能根據兩路脈沖的先后次序判別電機的轉向,省去了外部辯向電路,增加了系統的可靠性。在信號隔離功能之外,光耦還起到濾除脈沖尖峰和毛刺,增強抗干擾能力。










評論